Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
New issue
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and privacy statement. We’ll occasionally send you account related emails.
Already on GitHub? Sign in to your account
Netzer Encoder #264
Netzer Encoder #264
Changes from all commits
3121f7fea6bf30f4441bd3bda06dca615ccac229acaa15759e915c889278f9f5c4764d9a88e0302b2bc1005e01aa05457348ef25110d6a4ee11fd0c6fa050370ff8dcf765824ef9397aFile filter
Filter by extension
Conversations
Jump to
There are no files selected for viewing
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Should the raw data be exposed publicly? Why would we need it instead of the the angle or angular velocity?
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Make this constexpr
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
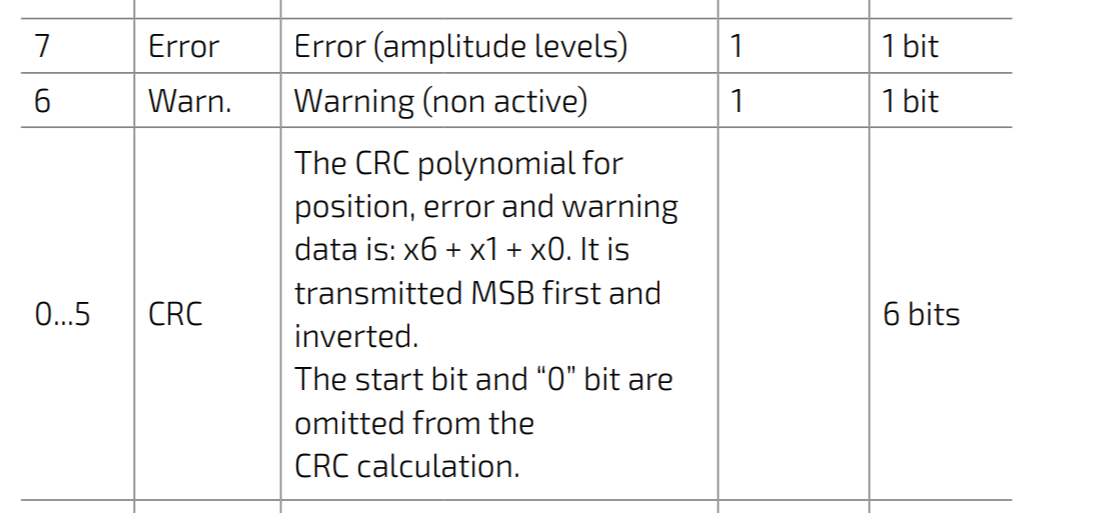
You should also be verifying the CRC. If the checksum is wrong then this read() function should return false to indicate faulty data. There's also these Error and Warn bits, might be worth looking into what those represent.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
make this a compile time constant