DRIVE PX2 Docker
The version of Autoware provided via DRIVE PX2 Docker is 1.6.2 and not updated for a long time.
This page guides you to install and run Autoware on the NVIDIA DRIVE PX2 platform using Docker. Note that DRIVE PX2 requires you to be a licensee of NVIDIA DRIVE and DevZone. To complete the installation process introduced below, please contact Autoware Developers Group at [email protected]. For other platforms, such as Generic x86, please check here whether they are supported. The outline of this page is as follows:
- Docker Setup
- Autoware Setup
- DriveWorks Interface
You first need to setup the Docker environment. You may not access docker.io with the default configuration of Ubuntu 16.04, so try the following installation process.
$sudo apt-get install -y software-properties-common
$sudo apt-add-repository universe
$sudo apt-get update
$sudo apt-get install docker.io
$sudo apt-get updateType the following commands.
$sudo docker info | grep "Docker Root Dir"If you get the following output, you might continue with the process.
Docker Root Dir: /var/lib/docker- 15 GB of free space (7GB temporarily used)
- CUDA 9.0 installed
-
Download install_autoware_drivepx2_docker.sh.
-
Change to the download directory, and execute the following commands in the terminal. Note that the script will modify
.bashrcto add Autoware to the path env variable. If you a different shell than bash, please add "/usr/local/autoware/bin" to${PATH}.$ sudo ./install_autoware_drivepx2_docker.sh $ source ~/.bashrc
Execute
$ autoware-docker
This will launch an interactive bash inside the Docker container. To launch Autoware, run:
$ ~/start_autoware.sh
Autoware RTM should be displayed.
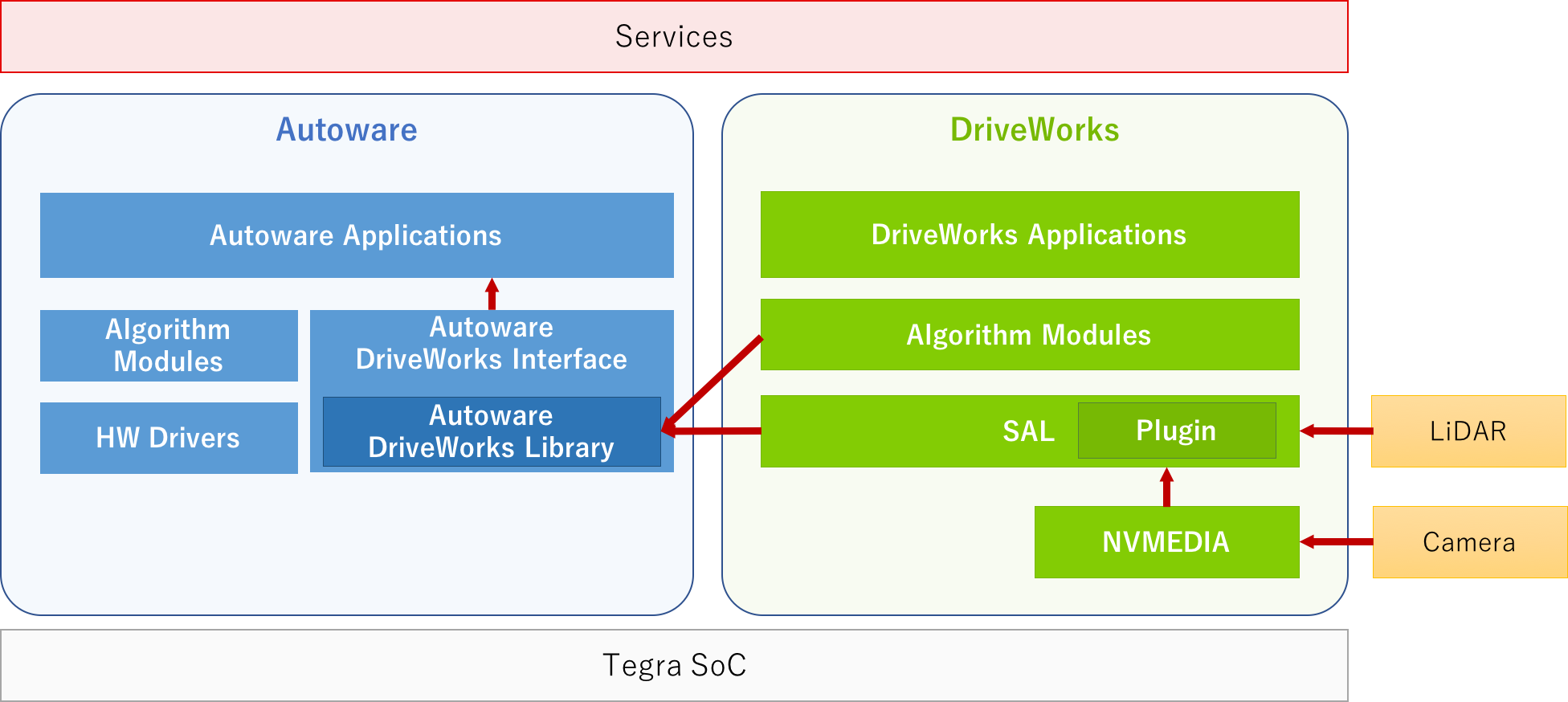
Autoware integrates a ROS interface to communicate with the DriveWorks API. This interface is provided as the autoware_driveworks_interface package, where the actual codebase is protected by the binary format due to a proprietary constraint of DriveWorks. When using DriveWorks with Autoware, we encourage you to use the DriveWorks Sensor Abstraction Layer (SAL), which provides a universal interface for different sensors, such as LiDARs and cameras, to be efficiently managed on the DRIVE PX2 platform.
![]()