***** New: Our recent work on One-stage VG is available at ReSC.*****
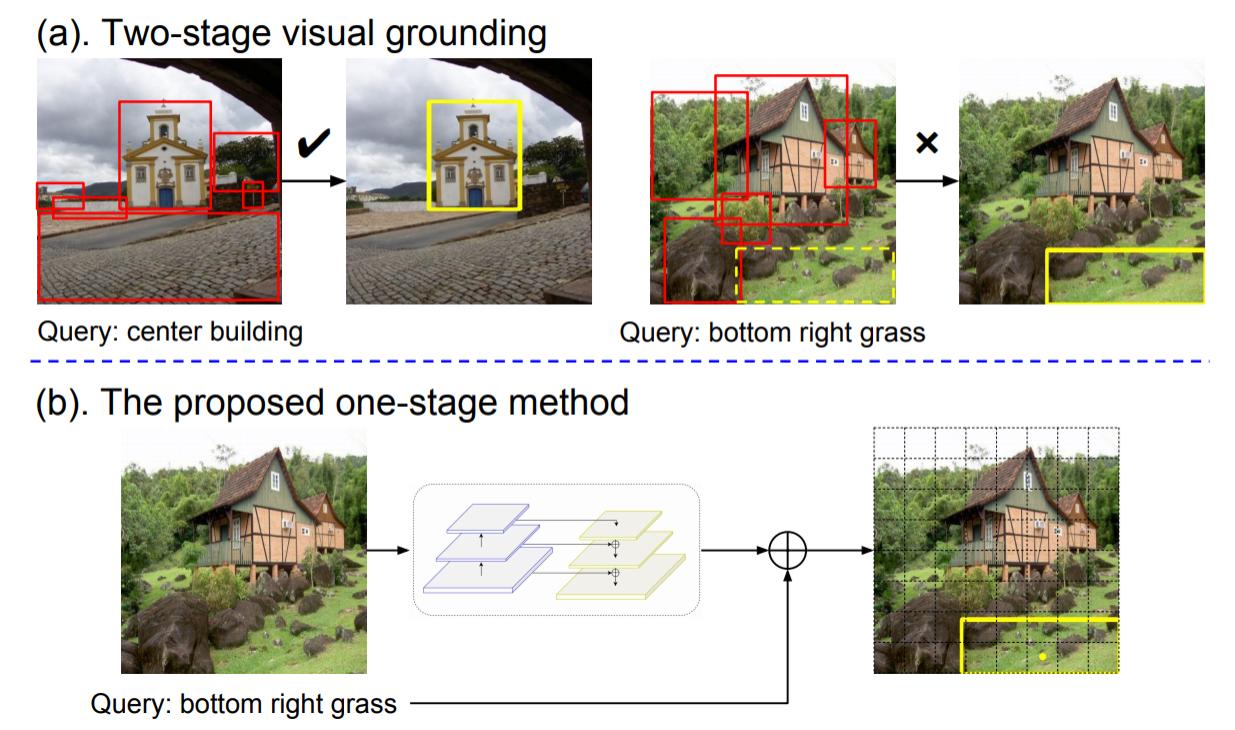
A Fast and Accurate One-Stage Approach to Visual Grounding
by Zhengyuan Yang, Boqing Gong, Liwei Wang, Wenbing Huang, Dong Yu, and Jiebo Luo
IEEE International Conference on Computer Vision (ICCV), 2019, Oral
We propose a simple, fast, and accurate one-stage approach to visual grounding. For more details, please refer to our paper.
@inproceedings{yang2019fast,
title={A Fast and Accurate One-Stage Approach to Visual Grounding},
author={Yang, Zhengyuan and Gong, Boqing and Wang, Liwei and Huang
, Wenbing and Yu, Dong and Luo, Jiebo},
booktitle={ICCV},
year={2019}
}
- Python 3.5 (3.6 tested)
- Pytorch 0.4.1
- Others (Pytorch-Bert, OpenCV, Matplotlib, scipy, etc.)
-
Clone the repository
git clone https://github.com/zyang-ur/onestage_grounding.git -
Prepare the submodules and associated data
- RefCOCO & ReferItGame Dataset: place the data or the soft link of dataset folder under
./ln_data/. We follow dataset structure DMS. To accomplish this, thedownload_dataset.shbash script from DMS can be used.bash ln_data/download_data.sh --path ./ln_data
-
Flickr30K Entities Dataset: please download the images for the dataset on the website for the Flickr30K Entities Dataset and the original Flickr30k Dataset. Images should be placed under
./ln_data/Flickr30k/flickr30k_images. -
Data index: download the generated index files and place them as the
./datafolder. Availble at [Gdrive], [One Drive].rm -r data tar xf data.tar -
Model weights: download the pretrained model of Yolov3 and place the file in
./saved_models.sh saved_models/yolov3_weights.sh
More pretrained models are availble in the performance table [Gdrive], [One Drive] and should also be placed in ./saved_models.
-
Train the model, run the code under main folder. Using flag
--lstmto access lstm encoder, Bert is used as the default. Using flag--lightto access the light model.python train_yolo.py --data_root ./ln_data/ --dataset referit \ --gpu gpu_id --batch_size 32 --resume saved_models/lstm_referit_model.pth.tar \ --lr 1e-4 --nb_epoch 100 --lstm -
Evaluate the model, run the code under main folder. Using flag
--testto access test mode.python train_yolo.py --data_root ./ln_data/ --dataset referit \ --gpu gpu_id --resume saved_models/lstm_referit_model.pth.tar \ --lstm --test -
Visulizations. Flag
--save_plotwill save visulizations.
Please check the detailed experiment settings in our paper.
| Dataset | Ours-LSTM | Performance ([email protected]) | Ours-Bert | Performance ([email protected]) |
|---|---|---|---|---|
| ReferItGame | Gdrive | 58.76 | Gdrive | 59.30 |
| Flickr30K Entities | One Drive | 67.62 | One Drive | 68.69 |
| RefCOCO | val: 73.66 | val: 72.05 | ||
| testA: 75.78 | testA: 74.81 | |||
| testB: 71.32 | testB: 67.59 |
Part of the code or models are from DMS, MAttNet, Yolov3 and Pytorch-yolov3.