This project demonstrates an idea of training the neural network to play the game autonomously by observing player's actions.
The game itself is just a car riding the road. There are possible turns and obstacles on the way. The NN should learn how to steer in order to follow the road and avoid collisions.
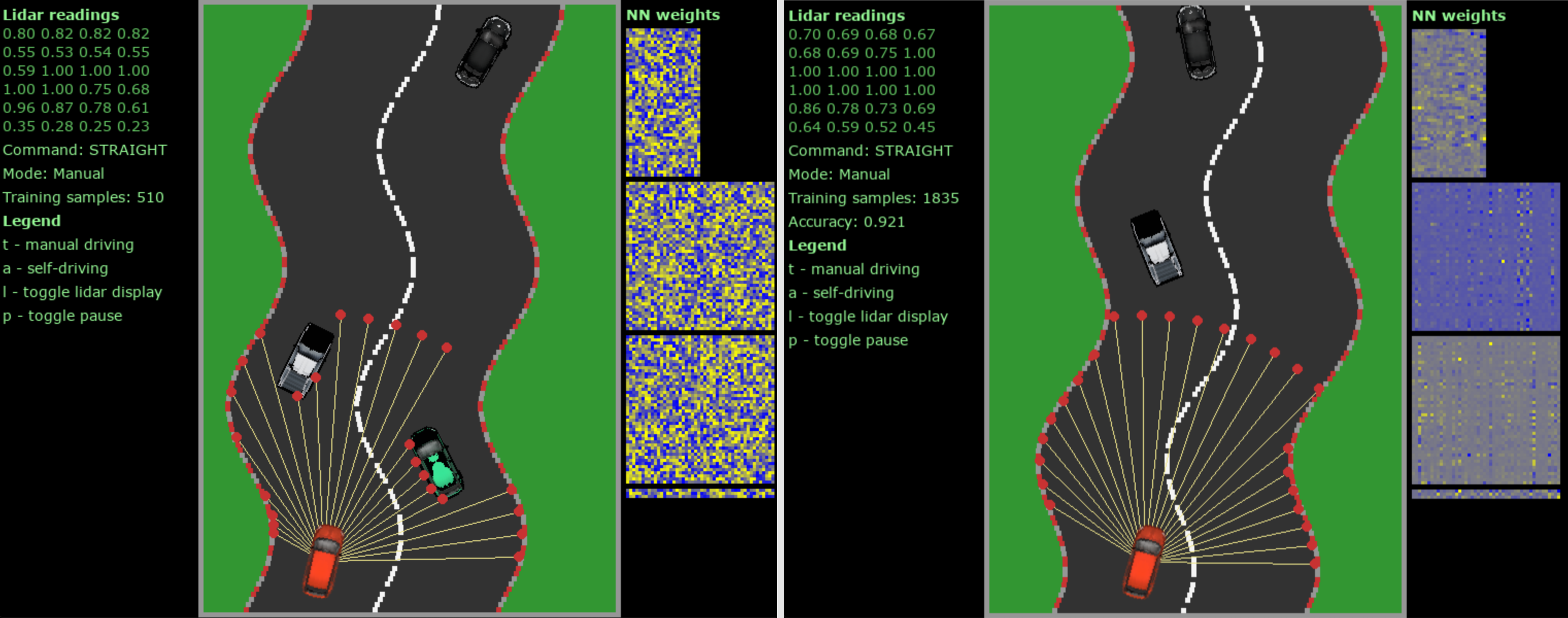
Lidar readings
Command: (Left, Right, Straight)
- PyTorch
- PyGame