Source code for http://arxiv.org/pdf/1510.03232.pdf
On Ubuntu 14.04, you will first need to install OpenRAVE. Next, install other required dependencies by:
sudo apt-get install cython python python-dev python-pip python-scipy python-tk
sudo pip install pycddlib quadprogNext, you will need to install the
contact_stability ROS
package. Link it into your Catkin workspace and build. The installation is successful if
you can run roslaunch contact_stability all.launch without error. Finally, clone the
repository with its submodules:
git clone --recursive https://github.com/stephane-caron/tro-2016There are three sub-folders corresponding to different developments of the paper:
- full_support_area for the Full Support Area (Section III of the paper)
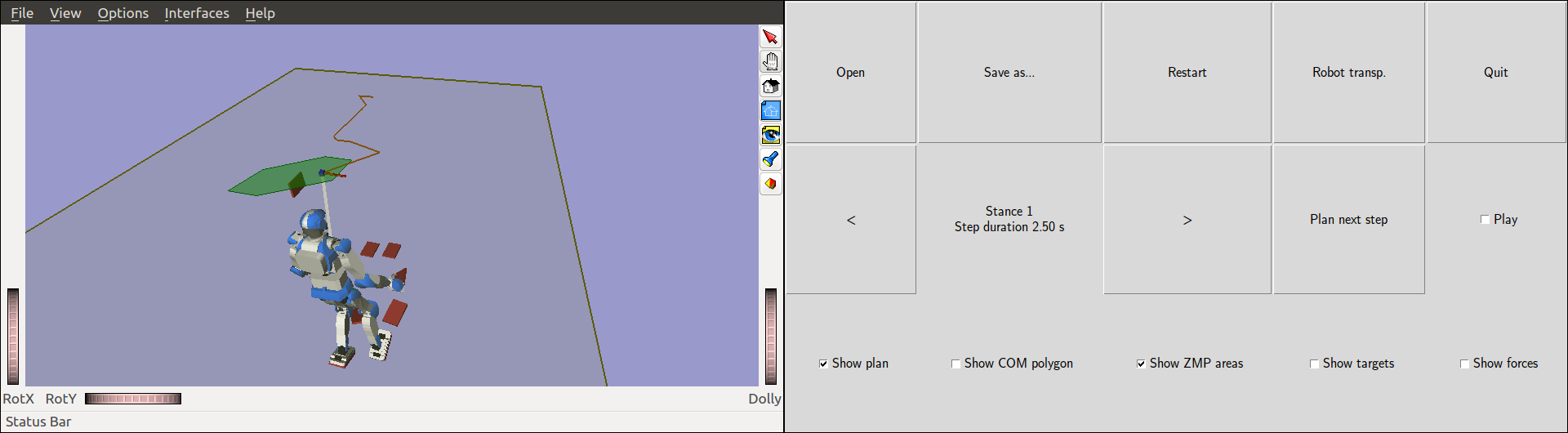
- motion_editor for the motion generation framework (Section V) based on the Pendular Support Area (Section IV)
- n_moment_point for the n-Moment Point (Appendix A)