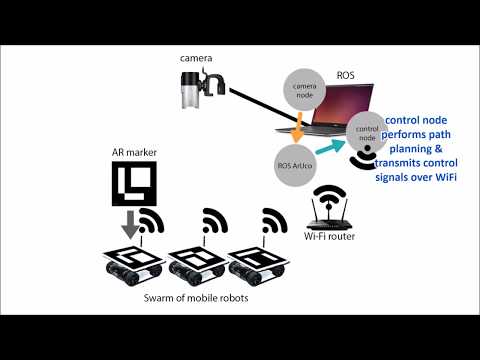
This repository containts the ROS workspace for a project that utilizes the ArUco library in C++, along with Python code, for the localization and centralized control of a swarm of mobile robots.
This project was accomplished as a result of my research at the Human Oriented Robotics and Control (HORC) Lab at Arizona State University.
Click below to see the video of this project in action:
For a detailed explanation of this project and its modules, please consult: localization-centralized-control-detailed-readme.pdf
As of now the source code of this project is very lightly commented, so keep that in mind. If you use any part of my work in your project, I request that you give proper credit.
- Developers of ArUco: https://www.uco.es/investiga/grupos/ava/node/26\
- Professor Panagiotis (Panos) Artemiadis from ASU HORC Lab (http://horc.engineering.asu.edu/HORC/Home.html) for mentoring this project as well as facilitating all the hardware and work space