Added support for parsing date and time. See Example14_GetDateTime.
 |
 |
 |
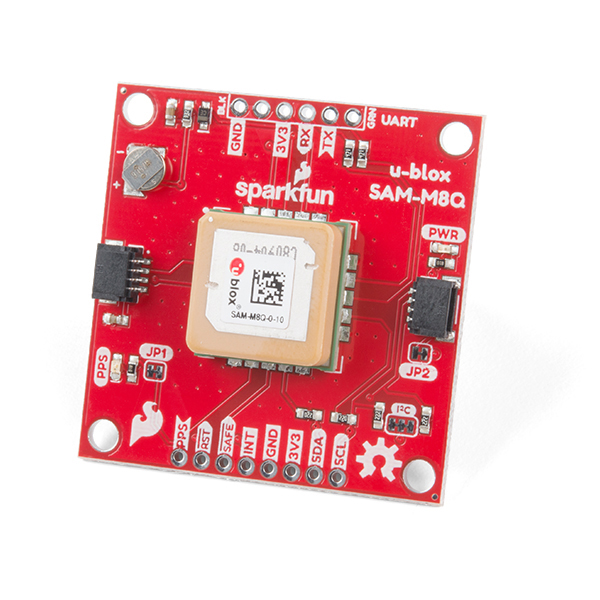 |
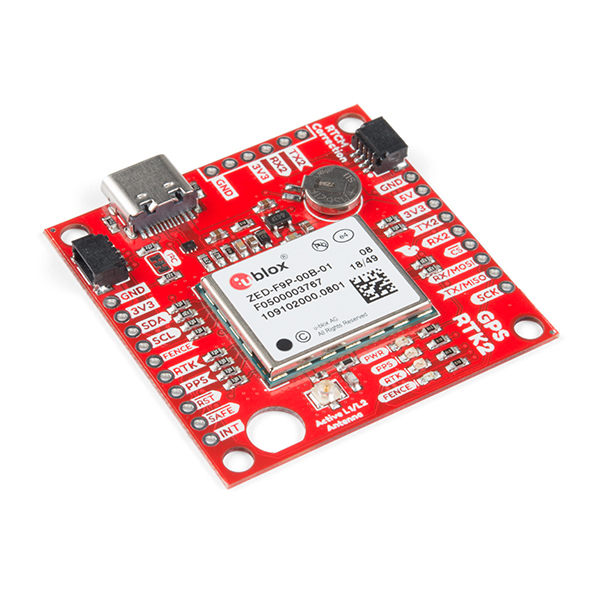
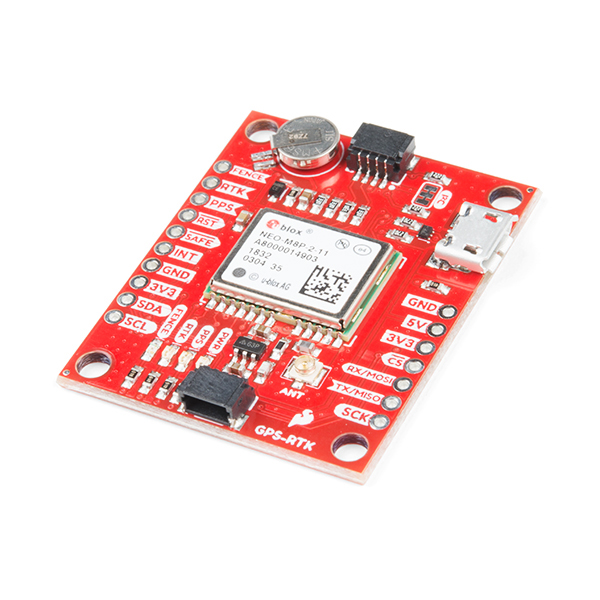
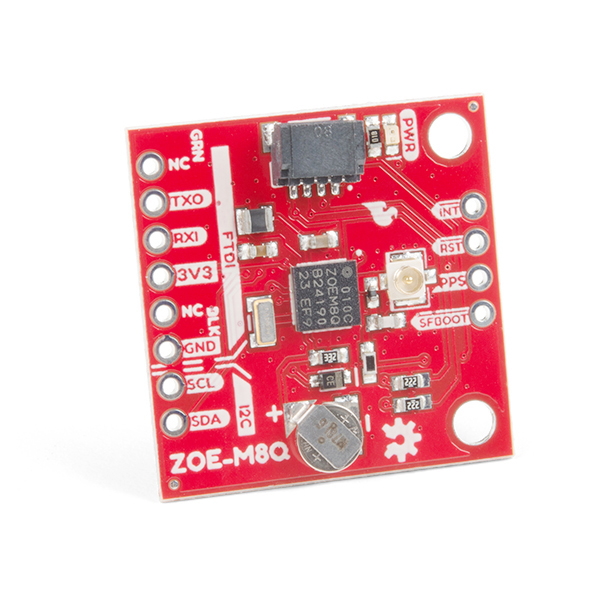
| SparkFun GPS-RTK2 - ZED-F9P (GPS-15136) | SparkFun GPS-RTK - NEO-M8P-2 (GPS-15005) | SparkFun ZOE-M8Q Breakout (GPS-15193) | SparkFun SAM-M8Q Breakout (GPS-15210) |
Ublox makes some incredible GPS receivers covering everything from low-cost, highly configurable modules such as the SAM-M8Q all the way up to the surveyor grade ZED-F9P with precision of the diameter of a dime. This library focuses on configuration and control of Ublox devices over I2C (called DDC by Ublox) and Serial. The UBX protocol is supported over both I2C and serial, and is a much easier and lighterweight interface to a GPS module. Stop parsing NMEA data! And simply ask for the datums you need.
This library can be installed via the Arduino Library manager. Search for SparkFun Ublox.
Want to help? Please do! We are always looking for ways to improve and build out features of this library.
Thanks to:
- We are always interested in adding SPI support with a checkUbloxSPI() function
- trycoon for fixing the lack of I2C buffer length defines
- tve for building out serial additions and examples
Need a library for the Ublox and Particle? Checkout the Particle library fork.
- /examples - Example sketches for the library (.ino). Run these from the Arduino IDE.
- /src - Source files for the library (.cpp, .h).
- keywords.txt - Keywords from this library that will be highlighted in the Arduino IDE.
- library.properties - General library properties for the Arduino package manager.
- Installing an Arduino Library Guide - Basic information on how to install an Arduino library.
This library supports two modes of operation for getting navigation information with the getPVT
function (based on the UBX_NAV_PVT protocol packet): polling and auto-reporting.
The standard method is for the sketch to call getPVT (or one of the getLatitude, getLongitude,
etc. methods) when it needs a fresh navigation solution. At that point the library sends a request
to the GPS to produce a fresh solution. The GPS then waits until the next measurement occurs (e.g.
once per second or as set using setNavigationFrequency) and then sends the fresh data.
The advantage of this method is that the data received is always fresh, the downside is that getPVT
can block until the next measurement is made by the GPS, e.g. up to 1 second if the nav frequency is
set to one second.
An alternate method can be chosen using setAutoPVT(true) which instructs the GPS to send the
navigation information (UBX_NAV_PVT packet) as soon as it is produced. This is the way the older
NMEA navigation data has been used for years. The sketch continues to call getPVT as before but
under the hood the library returns the data of the last solution received from the GPS, which may be
a bit out of date (how much depends on the setNavigationFrequency value).
The advantage of this method is that getPVT does not block: it returns true if new data is available
and false otherwise. The disadvantages are that the data may be a bit old and that buffering for
these spontaneus UBX_NAV_PVT packets is required (100 bytes each). When using Serial the buffering
is an issue because the std serial buffer is 32 or 64 bytes long depending on Arduino version. When
using I2C the buffering is not an issue because the GPS device has at least 1KB of internal buffering
(possibly as large as 4KB).
As an example, assume that the GPS is set to produce 5 navigation
solutions per second and that the sketch only calls getPVT once a second, then the GPS will queue 5
packets in its internal buffer (about 500 bytes) and the library will read those when getPVT is
called, update its internal copy of the nav data 5 times, and return true to the sketch. The
skecth calls getLatitude, etc. and retrieve the data of the most recent of those 5 packets.
- GPS-15136 - SparkFun GPS-RTK2 ZED-F9P
- GPS-15005 - SparkFun GPS-RTK NEO-M8P-2
- GPS-15210 - SparkFun GPS Breakout - Chip Antenna, SAM-M8Q (Qwiic)
- GPS-15193 - SparkFun GPS Breakout - Chip Antenna, ZOE-M8Q (Qwiic)
- SPX-14980 - SparkX GPS-RTK Black
- SPX-15106 - SparkX SAM-M8Q
This product is open source!
Various bits of the code have different licenses applied. Anything SparkFun wrote is beerware; if you see me (or any other SparkFun employee) at the local, and you've found our code helpful, please buy us a round!
Please use, reuse, and modify these files as you see fit. Please maintain attribution to SparkFun Electronics and release anything derivative under the same license.
Distributed as-is; no warranty is given.
- Your friends at SparkFun.