forked from IntelRealSense/librealsense
-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge branch 'development' into windows_hid_support
- Loading branch information
Showing
43 changed files
with
2,258 additions
and
1,184 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,25 @@ | ||
| # minimum required cmake version: 3.1.0 | ||
| cmake_minimum_required(VERSION 3.1.0) | ||
|
|
||
| project(rs-callback) | ||
|
|
||
| # Save the command line compile commands in the build output | ||
| set(CMAKE_EXPORT_COMPILE_COMMANDS 1) | ||
|
|
||
| include(CheckCXXCompilerFlag) | ||
| CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11) | ||
| CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X) | ||
| if(COMPILER_SUPPORTS_CXX11) | ||
| set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") | ||
| elseif(COMPILER_SUPPORTS_CXX0X) | ||
| set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x") | ||
| endif() | ||
|
|
||
| if(BUILD_GRAPHICAL_EXAMPLES) | ||
| add_executable(${PROJECT_NAME} ${PROJECT_NAME}.cpp) | ||
| target_link_libraries(${PROJECT_NAME} ${DEPENDENCIES}) | ||
| include_directories(${PROJECT_NAME} ../ ../../third-party/tclap/include) | ||
| set_target_properties (${PROJECT_NAME} PROPERTIES FOLDER "Examples") | ||
|
|
||
| install(TARGETS ${PROJECT_NAME} RUNTIME DESTINATION ${CMAKE_INSTALL_BINDIR}) | ||
| endif() |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,90 @@ | ||
| # rs-callback Sample | ||
|
|
||
| ## Overview | ||
|
|
||
| This sample demonstrates how to configure the camera for streaming frames using the pipeline's callback API. | ||
| This API is recommended when streaming high frequency data such as IMU ([Inertial measurement unit](https://en.wikipedia.org/wiki/Inertial_measurement_unit)) since the callback is invoked immediately once the a frame is ready. | ||
| This sample prints a frame counter for each stream, the code demonstrates how it can be done correctly by synchronizing the callbacks. | ||
|
|
||
| ## Expected Output | ||
|  | ||
|
|
||
| ## Code Overview | ||
|
|
||
| First, we include the Intel® RealSense™ Cross-Platform API. | ||
| All but advanced functionality is provided through a single header: | ||
| ```cpp | ||
| #include <librealsense2/rs.hpp> // Include RealSense Cross Platform API | ||
| ``` | ||
|
|
||
| We define frame counters that will be updated every time a frame arrives. | ||
| This counters will be used in the application main loop to print how many frames arrived from each stream. | ||
| ```cpp | ||
| std::map<int, int> counters; | ||
| std::map<int, std::string> stream_names; | ||
| ``` | ||
|
|
||
| The mutex object is a synchronization primitive that will be used to protect our frame counters from being simultaneously accessed by multiple threads. | ||
| ```cpp | ||
| std::mutex mutex; | ||
| ``` | ||
|
|
||
| Define the frame callback which will be invoked by the pipeline on the sensors thread once a frame (or synchronised frameset) is ready. | ||
| ```cpp | ||
| // Define frame callback | ||
| // The callback is executed on a sensor thread and can be called simultaneously from multiple sensors. | ||
| // Therefore any modification to shared data should be done under lock. | ||
| auto callback = [&](const rs2::frame& frame) | ||
| { | ||
| std::lock_guard<std::mutex> lock(mutex); | ||
| if (rs2::frameset fs = frame.as<rs2::frameset>()) | ||
| { | ||
| // With callbacks, all synchronized stream will arrive in a single frameset | ||
| for (rs2::frame& f : fs) | ||
| counters[f.get_profile().unique_id()]++; | ||
| } | ||
| else | ||
| { | ||
| // Stream that bypass synchronization (such as IMU) will produce single frames | ||
| counters[frame.get_profile().unique_id()]++; | ||
| } | ||
| }; | ||
| ``` | ||
|
|
||
| The SDK API entry point is the `pipeline` class: | ||
| ```cpp | ||
| // Declare the RealSense pipeline, encapsulating the actual device and sensors | ||
| rs2::pipeline pipe; | ||
|
|
||
| // Start streaming through the callback with default recommended configuration | ||
| // The default video configuration contains Depth and Color streams | ||
| // If a device is capable to stream IMU data, both Gyro and Accelerometer are enabled by default | ||
| rs2::pipeline_profile profiles = pipe.start(callback); | ||
| ``` | ||
|
|
||
| Collect the stream names from the returned `pipeline_profile` object: | ||
| ```cpp | ||
| // Collect the enabled streams names | ||
| for (auto p : profiles.get_streams()) | ||
| stream_names[p.unique_id()] = p.stream_name(); | ||
| ``` | ||
|
|
||
| Finally, print the frame counters once every second. | ||
| After calling `start`, the main thread will continue to execute work, so even when no other action is required, we need to keep the application alive. | ||
| In order to protect our counters from being accessed simultaneously, access the counters using the mutex. | ||
| ```cpp | ||
| std::cout << "RealSense callback sample" << std::endl << std::endl; | ||
|
|
||
| while (true) | ||
| { | ||
| std::this_thread::sleep_for(std::chrono::seconds(1)); | ||
|
|
||
| std::lock_guard<std::mutex> lock(mutex); | ||
|
|
||
| std::cout << "\r"; | ||
| for (auto p : counters) | ||
| { | ||
| std::cout << stream_names[p.first] << "[" << p.first << "]: " << p.second << " [frames] || "; | ||
| } | ||
| } | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,78 @@ | ||
| // License: Apache 2.0. See LICENSE file in root directory. | ||
| // Copyright(c) 2017 Intel Corporation. All Rights Reserved. | ||
|
|
||
| #include <librealsense2/rs.hpp> // Include RealSense Cross Platform API | ||
| #include <iostream> | ||
| #include <map> | ||
| #include <chrono> | ||
| #include <mutex> | ||
| #include <thread> | ||
|
|
||
| // The callback example demonstrates asynchronous usage of the pipeline | ||
| int main(int argc, char * argv[]) try | ||
| { | ||
| //rs2::log_to_console(RS2_LOG_SEVERITY_ERROR); | ||
|
|
||
| std::map<int, int> counters; | ||
| std::map<int, std::string> stream_names; | ||
| std::mutex mutex; | ||
|
|
||
| // Define frame callback | ||
| // The callback is executed on a sensor thread and can be called simultaneously from multiple sensors | ||
| // Therefore any modification to common memory should be done under lock | ||
| auto callback = [&](const rs2::frame& frame) | ||
| { | ||
| std::lock_guard<std::mutex> lock(mutex); | ||
| if (rs2::frameset fs = frame.as<rs2::frameset>()) | ||
| { | ||
| // With callbacks, all synchronized stream will arrive in a single frameset | ||
| for (const rs2::frame& f : fs) | ||
| counters[f.get_profile().unique_id()]++; | ||
| } | ||
| else | ||
| { | ||
| // Stream that bypass synchronization (such as IMU) will produce single frames | ||
| counters[frame.get_profile().unique_id()]++; | ||
| } | ||
| }; | ||
|
|
||
| // Declare RealSense pipeline, encapsulating the actual device and sensors. | ||
| rs2::pipeline pipe; | ||
|
|
||
| // Start streaming through the callback with default recommended configuration | ||
| // The default video configuration contains Depth and Color streams | ||
| // If a device is capable to stream IMU data, both Gyro and Accelerometer are enabled by default | ||
| // | ||
| rs2::pipeline_profile profiles = pipe.start(callback); | ||
|
|
||
| // Collect the enabled streams names | ||
| for (auto p : profiles.get_streams()) | ||
| stream_names[p.unique_id()] = p.stream_name(); | ||
|
|
||
| std::cout << "RealSense callback sample" << std::endl << std::endl; | ||
|
|
||
| while (true) | ||
| { | ||
| std::this_thread::sleep_for(std::chrono::seconds(1)); | ||
|
|
||
| std::lock_guard<std::mutex> lock(mutex); | ||
|
|
||
| std::cout << "\r"; | ||
| for (auto p : counters) | ||
| { | ||
| std::cout << stream_names[p.first] << "[" << p.first << "]: " << p.second << " [frames] || "; | ||
| } | ||
| } | ||
|
|
||
| return EXIT_SUCCESS; | ||
| } | ||
| catch (const rs2::error & e) | ||
| { | ||
| std::cerr << "RealSense error calling " << e.get_failed_function() << "(" << e.get_failed_args() << "):\n " << e.what() << std::endl; | ||
| return EXIT_FAILURE; | ||
| } | ||
| catch (const std::exception& e) | ||
| { | ||
| std::cerr << e.what() << std::endl; | ||
| return EXIT_FAILURE; | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,50 @@ | ||
| # CMake Sample | ||
|
|
||
| ## Overview | ||
|
|
||
| This sample demonstrates how to create a basic librealsense application using CMake. | ||
| Currently this sample is supported only by Linux OS. | ||
|
|
||
| ## Prerequisite | ||
| Install the SDK or build it from source ([Linux](https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md)) | ||
|
|
||
| ## Expected Output | ||
| 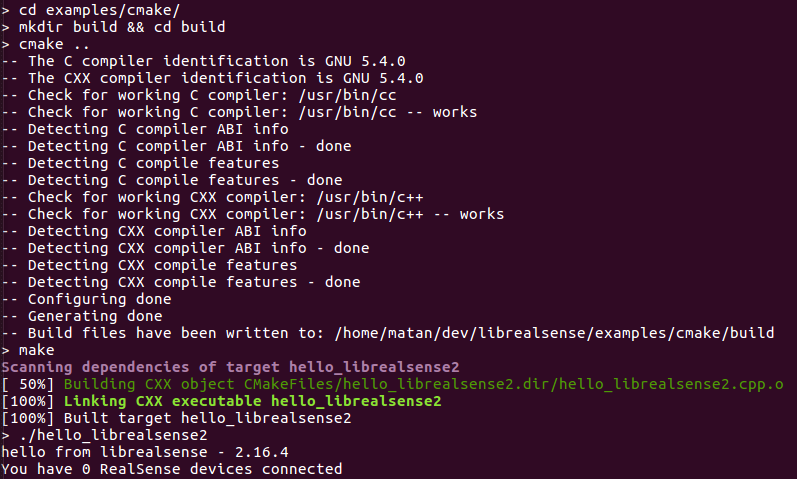 | ||
|
|
||
| ## Code Overview | ||
|
|
||
| Set minimum required CMake version | ||
| ``` | ||
| cmake_minimum_required(VERSION 3.1.0) | ||
| ``` | ||
|
|
||
| Name the project, in this sample the project name will be also the executable name | ||
| ``` | ||
| project(hello_librealsense2) | ||
| ``` | ||
|
|
||
| Find librealsense installation, this feature is currently available only for Linux | ||
| ``` | ||
| # Find librealsense2 installed package | ||
| find_package(realsense2 REQUIRED) | ||
| ``` | ||
|
|
||
| Enable C++ 11 standard in the applicatoin | ||
| ``` | ||
| # Enable C++11 | ||
| set(CMAKE_CXX_STANDARD 11) | ||
| set(CMAKE_CXX_STANDARD_REQUIRED TRUE) | ||
| ``` | ||
|
|
||
| Point to the source files, in this simple example we have only one cpp file | ||
| ``` | ||
| # Add the application sources to the target | ||
| add_executable(${PROJECT_NAME} hello_librealsense2.cpp) | ||
| ``` | ||
|
|
||
| Link librealsense, the variable ${realsense2_LIBRARY} is set by "find_package" | ||
| ``` | ||
| # Link librealsense2 to the target | ||
| target_link_libraries(${PROJECT_NAME} ${realsense2_LIBRARY}) | ||
| ``` | ||
|
|
Oops, something went wrong.