For this project, we will work with the Reacher environment!

{kind=link}
In this environment, a double-jointed arm can move to target locations. A reward of +0.1 is provided for each step that the agent's hand is in the goal location. Thus, the goal of your agent is to maintain its position at the target location for as many time steps as possible.
The observation space consists of 33 variables corresponding to position, rotation, velocity, and angular velocities of the arm. Each action is a vector with four numbers, corresponding to torque applicable to two joints. Every entry in the action vector should be a number between -1 and 1.
For this project, we have two separate versions of the Unity environment:
- The first version contains a single agent.
- The second version contains 20 identical agents, each with its own copy of the environment.
The second version is useful for algorithms like PPO, A3C, and D4PG that use multiple (non-interacting, parallel) copies of the same agent to distribute the task of gathering experience.
The task is episodic, and in order to solve the environment, your agent must get an average score of +30 over 100 consecutive episodes.
The barrier for solving the second version of the environment is slightly different, to take into account the presence of many agents. In particular, your agents must get an average score of +30 (over 100 consecutive episodes, and over all agents). Specifically,
After each episode, we add up the rewards that each agent received (without discounting), to get a score for each agent. This yields 20 (potentially different) scores. We then take the average of these 20 scores. This yields an average score for each episode (where the average is over all 20 agents). As an example, consider the plot below, where we have plotted the average score (over all 20 agents) obtained with each episode.
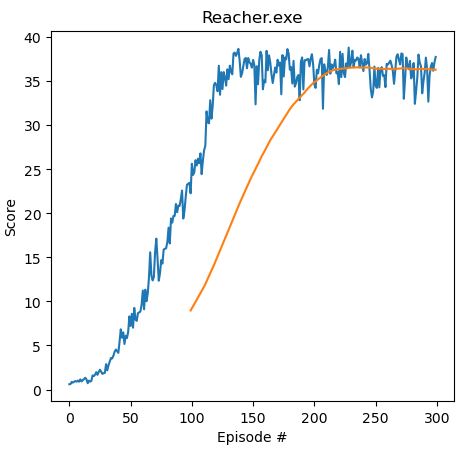
The environment is considered solved, when the average (over 100 episodes) of those average scores is at least +30. In the case of the plot above, the environment was solved at episode 63, since the average of the average scores from episodes 64 to 163 (inclusive) was greater than +30.
Follow the instructions below to explore the environment on your own machine! You will also learn how to use the Python API to control your agent.
If you haven't already, please follow the instructions in the DRLND GitHub repository to set up your Python environment. These instructions can be found in README.md at the root of the repository. By following these instructions, you will install PyTorch, the ML-Agents toolkit, and a few more Python packages required to complete the project.
(For Windows users) The ML-Agents toolkit supports Windows 10. While it might be possible to run the ML-Agents toolkit using other versions of Windows, it has not been tested on other versions. Furthermore, the ML-Agents toolkit has not been tested on a Windows VM such as Bootcamp or Parallels.
For this project, you will not need to install Unity - this is because we have already built the environment for you, and you can download it from one of the links below. You need only select the environment that matches your operating system:
- Linux: click here
- Windows: click here
- Linux: click here
- Windows: click here
Then, place the file in the p2_continuous-control/ folder in the DRLND GitHub repository, and unzip (or decompress) the file.
After you have followed the instructions above, open Continuous_Control.ipynb (located in the p2_continuous-control/ folder in the DRLND GitHub repository) and follow the instructions to learn how to use the Python API to control the agent.
Follow the instructions in continuous_control.py to get started with training your own agent!
solved_t2_checkpoint_actor.pth and solved_t2_checkpoint_critic.pth are the weights of a trined DDPG agent!