{kind=link}
Download the latest release code => ZIPFILE See Tags.
Example of kuka robots. The program has loaded 2 ChainVectors (projects), each containing 8 Segments (joints). That brings this example with 16 controlled axis. It's nothing special. Just build up your program dynamicly.
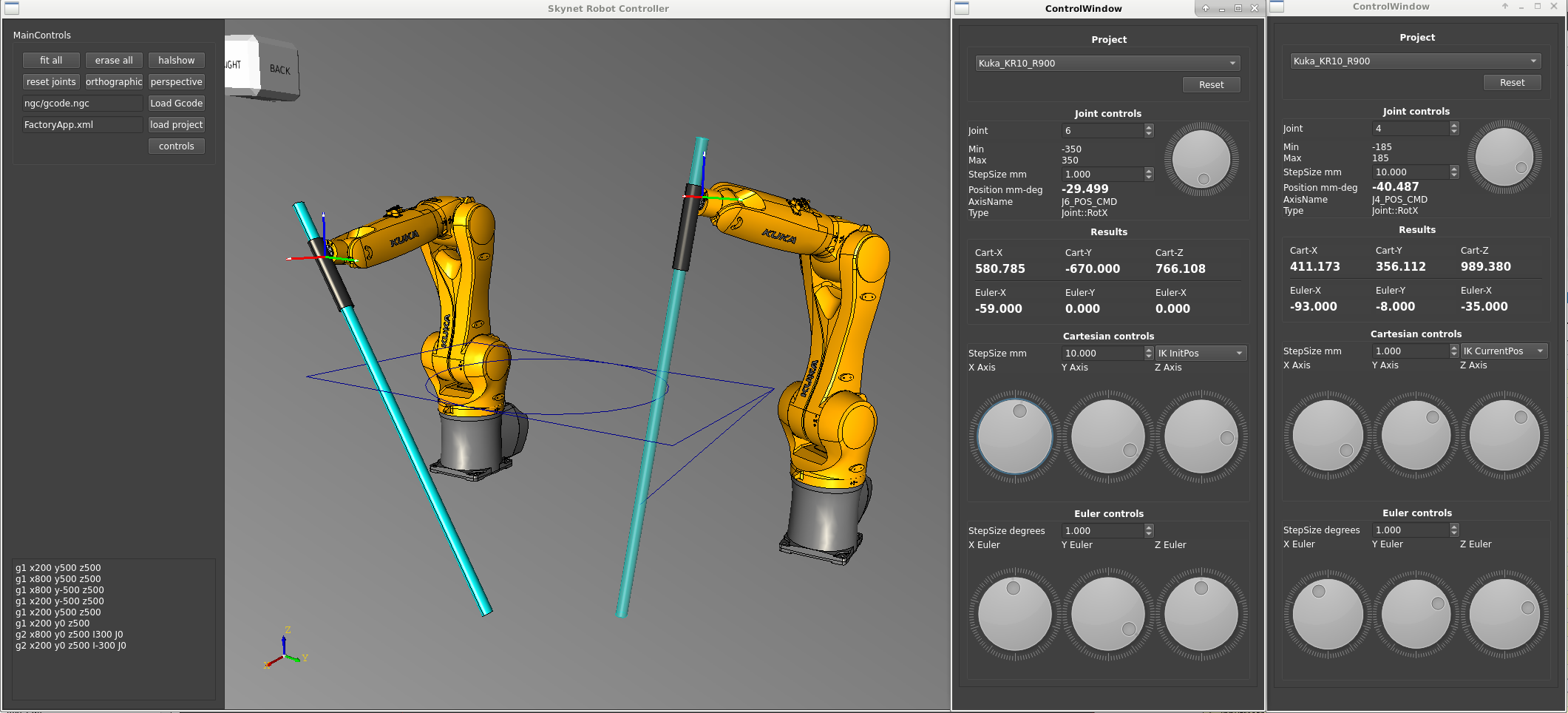
The ammount of controlled axis is dynamic. Can be rotational, translational. It doens't matter. Thanks to the KDL coronos inverse kinematics and the OpenCascade libs !
The robot's are specified in the xml config file. Each project needs a xml config file. Inside the config file, the machine stepfiles are pointed out. Also the kinematic model is defined in the xml file in a simple way ! No dh parameters needed !
Documents and drawings are included.
This code can be used as a OpenCascade infocenter.
Have fun.
To be contineued.