This is a LOAM (Lidar Odometry and Mapping) ROS package for back and forth tilting 2D laser scanner. This package is a simple modified copy of the original one release by Ji Zhang. The only change on top of the original one is to make it a Catkin package and work under ROS Indigo. Please cite their paper if this package is used.
Wiki Webpage by the Author: http://wiki.ros.org/loam_back_and_forth
J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time. Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014.(PDF)(VIDEO)
Here I assume you have a Catkin worksapce under ~/ros_workspace/catkin_ws.
(1) gitclone the package into your "src" folder.
- cd ~/ros_workspace/catkin_ws/src
- git clone https://github.com/daobilige-su/loam_back_and_forth
(2) compile the package
- cd ~/ros_workspace/catkin_ws
- catkin_make
(3) download a ROS bag file for test dataset.
- roscd loam_back_and_forth
- mkdir data
- download nsh_staircase and nsh_undulating_motion dataset into your ~/ros_workspace/catkin_ws/src/loam_back_and_forth/data/ folder.
(4) run the package and rosbag file
-
- in 1st terminal:
- roslaunch loam_back_and_forth loam_back_and_forth.launch
-
- in 2nd terminal:
- roscd loam_back_and_forth/data/
- rosbay play nsh_staircase.bag or rosbay play nsh_undulating_motion.bag
- (use -r 0.5 if the result look bad and it is due to the less powerful CPU, (e.g. rosbay play nsh_staircase.bag -r 0.5))
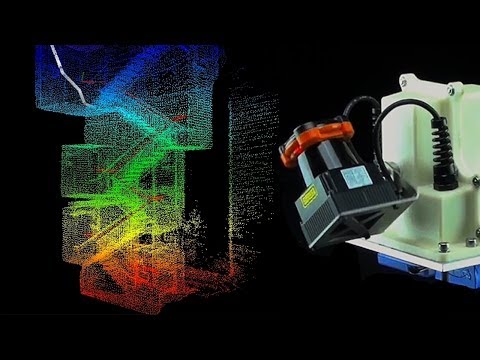
YOU SHOULD SEE A RESULT SIMILAR TO THEIR DEMO VIDEO (nsh_staircase DEMO VIDEO and nsh_undulating_motion DEMO VIDEO). GOOD LUCK.
Lidar Odometry and Mapping (Loam) is a realtime method for state estimation and mapping using a 3D lidar, and optionally an IMU. The program contains four nodes. The “scanRegistration” node stacks laser scans within a sweep and publishes them as point cloud. The “laserOdometry” node estimates motion of the lidar between two sweeps, at a higher frame rate. The node corrects distortion in the point cloud from motion of the lidar. The “laserMapping” node takes the output of “laser_odometry” and incrementally builds a map. It also computes pose of the lidar on the map, at a lower frame rate. The state estimation of the lidar is combination of the outputs from “laserOdometry” and “laserMapping”, integrated in the “transformMaintenance” node.
The program is tested on ROS Fuerte, on a laptop computer with 2.5 GHz quad cores and 6 Gib memory (the program consumes two cores). This version uses a lidar that spins back and forth.
Wiki Webpage: http://wiki.ros.org/loam_back_and_forth