scratch2mip is ScratchX extension that enables Scratch to control balancing robot, WowWee MiP.

- MacOS 10.13.2(High Sierra)
- node.js is required
- Windows 10
- Setup instruction is available at http://swikis.ddo.jp/WorldStethoscope/59 (Japanese)
- Raspberry Pi 3
- Setup instruction is available at http://nasu-lab.blogspot.jp/2016/06/raspberry-pi-3scratch2mip.html (Japanese)
- Raspberry Pi 2
- Setup instruction is available at http://nasu-lab.blogspot.jp/2016/06/raspberry-pi-2scratch2mip.html (Japanese)
To control MiP, Helper App needs to be installed. You need node.js to run it.
% cd workdir
% wget https://champierre.github.com/scratch2mip/scratch2mip_helper.zip
% unzip scratch2mip_helper.zip
% cd scratch2mip_helper
% npm install
Ignore WARN messages. These are warning messages.
-
Open ScratchX page.
-
Click "Open Extension URL" and paste the following URL, then click "Open".
http://champierre.github.io/scratch2mip/scratch2mip.js -
On Warning dialog, click "I understand, continue" if you trust scratch2mip.
-
Turn on Wowwee MiP.
-
Run the Helper App:
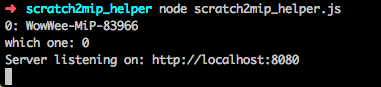
cd workdir/scratch2mpi_helper node scratch2mip_helper.js -
If the Helper App successfully connects to the robot, it lists your MiP. Choose the robot you want to control.
-
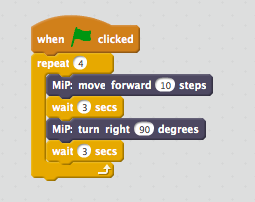
If the Helper App says "Server listening on...", you can control MiP from ScratchX using the following custom blocks.
-
Demo Project: scratch2mip_demo.sbx
-
Demo Project 2(Using the radar): scratch2mip_radar_demo.sbx [Demo Movie]


If you want to control MiP from Scratch 1.4, use scratch2mip_helper/scratch2mip_rsc.js.
-
Start Scratch 1.4.
-
Enable "remote sensor connections"(Click "Sensing" on the top left area, then right click on "slider sensor value". Select "enable remote sensor connections" in the context menu.)
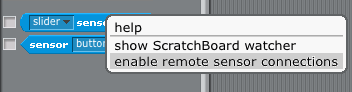
-
Run the Helper App RSC version:
cd workdir/scratch2mpi_helper node scratch2mip_rsc.js -
Use "broadcast" blocks to control MiP
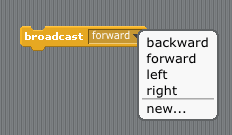
{kind=link}