line feature based SLAM, modified based on the famous ORB-SLAM2
- This repository served as my CMPUT630 Course Project in 2017.
- This repository is no longer maintained since I moved my interest to robot manipulation research.
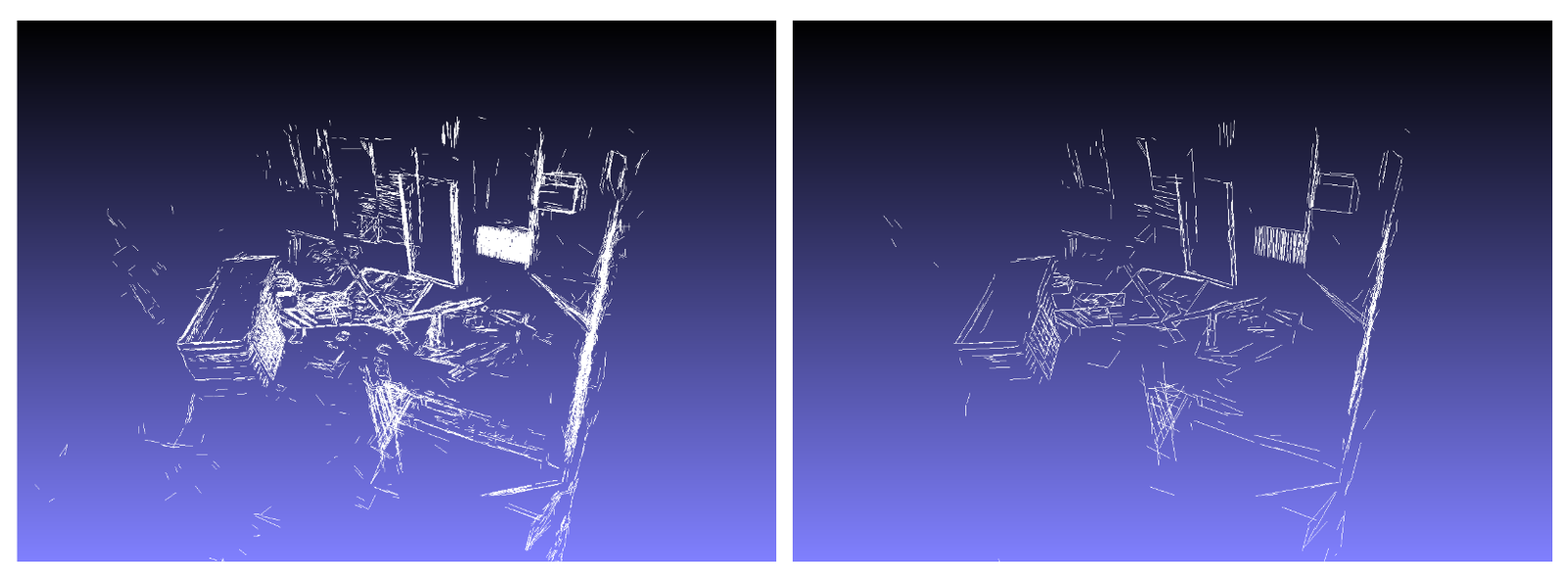
- Current problem is the accuracy of line correspondence detection when using the sparse feature points generated by ORB-SLAM. That's also the reason why very few map points are generated apart from the original points in ORB-SLAM.
- If you happen to feel this code helps you a little bit, that's all the values of this repo here.
- You can star it, but no need to cite it. It's not an original research project.
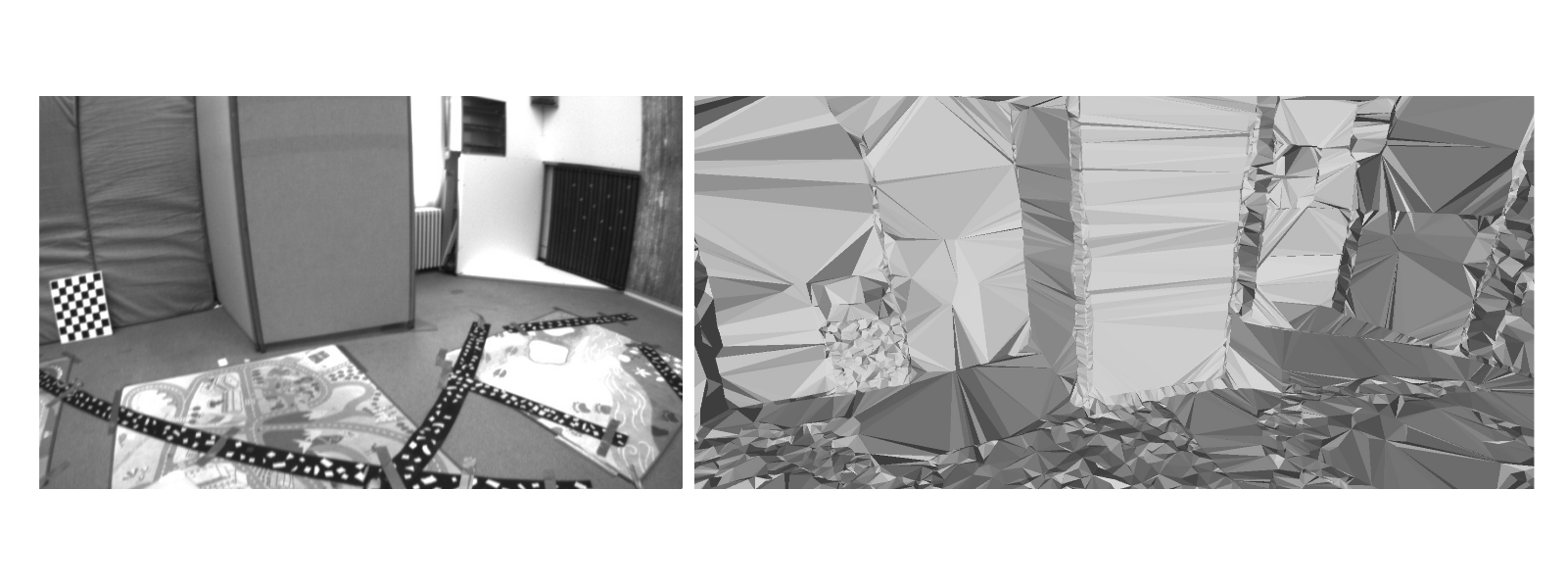
- If you are interested in SLAM using line features, I higly recommend you the research done by our lab member Shida:
Some results from Shida's work: