{kind=link}
{kind=link}
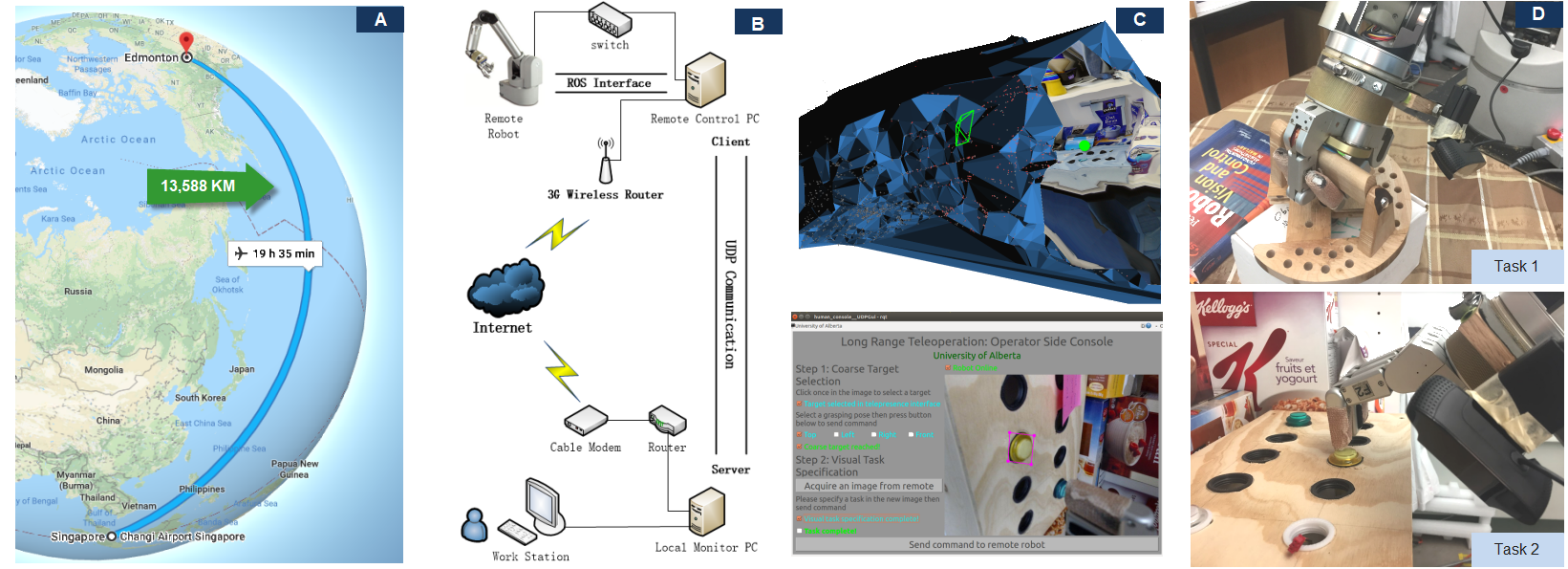
Implementation and annotation of Free Space Carving algorithm (CARV) using ORB-SLAM map points and camera poses.
- Maintenance will only be available when the author finds a full-time job. Sorry he has to raise two kids with very limited funding.
- More details on free space carving algorithm CARV are in Incremental Free-Space Carving for Real-Time 3D Reconstruction. Details on ORB-SLAM are in https://github.com/raulmur/ORB_SLAM2.
- Codes are used in a robotic teleoperation task (from Singapore to Edmonton). Details about this experiment can be found in Long range teleoperation for fine manipulation tasksunder time-delay network conditions.
- If you find the codes are useful, please cite CARV, Shida's paper and my paper. Citations are REALLY valuable, for a PhD student.
- However, if you prefer not to cite due to various reasons (e.g., not enough space in your paper), I totally agree.
- CARV using line features: semi-dense CARV
- It's basically a real-time method for 3D surface reconstruction.
- It can be used to have a coarse geometric estimation of the unknown remote environment.

export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:your-folder/Examples/ROS
echo
- ORB-SLAM library:chmod +x build.sh
- ./build.sh
1 chmod +x build_ros.sh 2 ./build_ros.sh
if errors indicate: no rule to make target... delete build folder and build again.
source your-folder/Examples/ROS/ORB_CARV_Pub/build/devel/setup.bash cd your-folder
- set env if you networking with other computers: export ROS_MASTER_URI=http://your-ip:11311 export ROS_HOSTNAME=your-ip
- roscore
- run your camera node, e.g., usb-cam launch file. For compressed image: rosrun image_transport republish compressed in:=/touch/usb_cam/image_raw raw out:=/chris/image
- rosrun ORB_CARV_Pub Mono Vocabulary/ORBvoc.txt chris_logic_HD720.yaml /camera/image_raw:=/usb_cam/image_raw
- src/Modeler : implementation of CARV algorithm
- src : add map points to CARV model, and display in Pangolin. Modified based on original ORB-SLAM2