Important
Repository Archived
This repository has been archived and is no longer actively maintained. You are welcome to explore the code, but please note that no further updates, issues, or pull requests will be accepted.
Thank you for your interest and contributions.
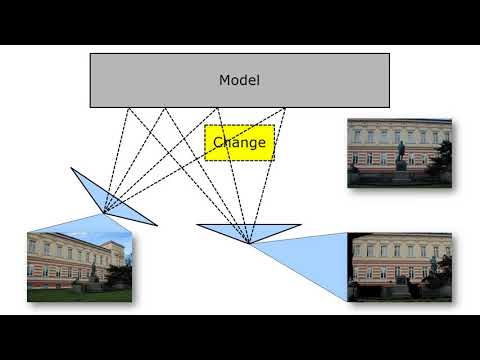
The program allows to identify, in real-time, changes on a 3D model from a sequence of images.
The idea is to first detect inconsistencies between pairs of images by reprojecting an image onto another one by passing through the 3D model. Ambiguities about possible inconsistencies resulting from this process are then resolved by combining multiple images. Finally, the 3D location of the change is estimated by projecting in 3D these inconsistencies.
Check out the video:
For further details, see the paper "Fast Image-Based Geometric Change Detection Given a 3D Model".
Emanuele Palazzolo ([email protected])
- The input images are calibrated and registered w.r.t. the 3D model
If you use this code for your research, please cite:
E. Palazzolo and C. Stachniss, “Fast Image-Based Geometric Change Detection Given a 3D Model”, in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2018. PDF
BibTeX:
@InProceedings{palazzolo2018icra,
Title = {{Fast Image-Based Geometric Change Detection Given a 3D Model}},
Author = {E. Palazzolo and C. Stachniss},
Booktitle = {Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA)},
Year = {2018}
}
- catkin
- Eigen >= 3.2
- boost >= 1.54
- OpenCV >= 2.4
- QT >= 5.2
- OpenGL >= 3.3
- glow (catkin package)
- (optional) Doxygen >= 1.8.11
On Ubuntu 16.04, most of the dependencies can be installed from the package manager:
sudo apt install git libeigen3-dev libboost-all-dev qtbase5-dev libglew-dev libopencv-dev catkinAdditionally, make sure you have catkin-tools and the fetch verb installed:
sudo apt install python-pip
sudo pip install catkin_tools catkin_tools_fetch empyFinally, if you also want to build the documentation you need Doxygen installed (tested only with Doxygen 1.8.11):
sudo apt install doxygenIf you do not have a catkin workspace already, create one:
cd
mkdir catkin_ws
cd catkin_ws
mkdir src
catkin init
cd src
git clone https://github.com/ros/catkin.gitClone the repository in your catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/Photogrammetry-Robotics-Bonn/fast_change_detection.gitDownload the additional dependencies:
catkin deps fetchThen, build the project:
catkin build fast_change_detectionNow the project root directory (e.g. ~/catkin_ws/src/fast_change_detection) should contain a bin directory containing an example binary and, if Doxygen is installed, a docs directory containing the documentation.
The ChangeDetector class is the core of the program. Its constructor requires
the 3D model of the environment and the options. Use the AddImage member function to
add an image and compute the inconsistencies with the others. Use the GetChanges
member function to compute and get the changes in the form of mean position and
covariance of the points of the 3D regions.
Refer to the documentation and to the source code for further details. An example
that illustrates how to use the library is located in src/example.cpp.
After the build process, the bin directory in the project root directory (e.g. ~/catkin_ws/src/fast_change_detection) will contain an example binary.
To run it execute from the command line:
cd ~/catkin_ws/src/fast_change_detection/bin
./fastcd_example DATASET_PATHwhere DATASET_PATH is the path to the directory of a dataset (e.g. ~/changedetection2017/statue).
Some example datasets can be found here.
Alternatively, the example directory contains some scripts to immediately test the library.
Make sure you have wget installed to download the dataset and zip to uncompress it:
sudo apt install wget zipDownload and uncompress the dataset:
cd ~/catkin_ws/src/fast_change_detection/example
./download_dataset.shExecute the example program:
./run_example.shA 3D visualization of the model will appear. The changes are represented by the blue ellipsoids. Rotate the view with the mouse while the right button is pressed. The keyboard is mapped as following:
- W/A/S/D -> Move around
- Space -> Move up vertically
- C -> Move down vertically
- Shift -> Keep pressed to move faster
- 1-0 -> Teleport the camera to the pose of one of the first 10 cameras
This project is licensed under the FreeBSD License. See the LICENSE.txt file for details.
This work has partly been supported by the DFG under the grant number FOR~1505: Mapping on Demand.