对官方源码简要解析,并自己按照官方project,创建一个简要openMVGLite版本,便于深入调试和了解源码细节。
整体框架转载自 知乎@迷途小书童
源码细节转载自 CSDN@蒲毛
- 核心库:各个功能的核心算法实现
- 样例:教你怎么用核心库实现高级算法
- 工具链:也就是连起来用咯(无序影像特征匹配,完整SfM,影像色彩处理)
- /src/dependencies 依赖库,包括gLfw, cereal, osi clp;
- /src/nonFree SIFT特征提取
- /src/openMVG 是多视图几何(MVG)和SfM的核心库
- /src/openMVG_Samples 展示如何使用核心库实现高级算法,主要涉及相对定向、特征匹配的鲁棒策略等;
- /src/software 提供用户使用的软件接口,主要实现了SfM及可视化,视觉里程计(Visual Odometry),地理坐标系转换,UI便于输入控制点数据;
- /src/third_party 是底层第三方库,主要有ceres-solver,eigen,fast,stlplus3,jpeg等;
| 模块 | 功能 |
|---|---|
| cameras | 定义针孔相机的几何模型,和多种畸变模型(多项式,Brown,鱼眼) |
| clustering | kmeans聚类 |
| color_harmonization | 颜色协调模型 |
| exif | 可交换图像文件格式,获取相机焦距mm和图像等相关信息 |
| features | 特征点提取,特征描述,可存储特征点位置、尺度、方向(xyso)和描述子 |
| geodesy | 处理GPS信息的坐标转换,将GPS的经纬高转换为空间直角坐标系或UTM投影坐标系 |
| geometry | 定义三维空间位姿和三维变换 |
| graph | 单元格 |
| graphics | 单元格 |
| image | image数据存储以及IO,支持ppm,pgm,jpeg,png,tiff |
| linearProgramming | 线性规划算法,以来三方库OSI_CLP |
| matching | 实现特征匹配,包括基于描述子相似度的初始匹配和几何滤波剔除误匹配点 |
| matching_image_collection | 单元格 |
| multiview | 双视图及多视图的几何解算 |
| numeric | 基于Eigen库实现矩阵和向量的高级操作,以及相应数值计算如SVD、QR、LU分解 |
| robust_estimation | 鲁棒估计RANSAC算法 |
| sfm | 运动恢复结构包括BA |
| spherical | 单元格 |
| stl | 单元格 |
| system | 单元格 |
| tracks | 物方点在多张影像上的像点观测集合,利用union_find算法从两两特征匹配结果生成 |
| 模块 | 功能 |
|---|---|
| ceres-solver | 一个便携式C++库,可用于建模和解决大型复杂的非线性最小二乘问题。 |
| cmdLine | 用于处理带有命名参数的C++命令行的轻量级的库 |
| CppUnitLite | 处理单元测试的轻量级库。 |
| cxsparse | 为ceres-solver的稀疏矩阵计算提供支持。 |
| easyexif | exif解析库简化版 |
| eigen | 用于线性代数,矩阵和矢量运算,数值求解,仅由模板头文件组成的的高级C++库。 |
| flann | 用于在高维空间中执行快速近似最近邻搜索的库。 |
| histogram | 计算数据统计分布的轻量级类。 |
| hnswlib | 快速近似最近邻搜索 |
| htmlDoc | 简化HTML数据导出的类。 |
| jpeg | jpeg图像库 |
| lemon | C ++模板库,为图网络计算提供提供常见的数据结构和算法。 |
| png | png图像库 |
| progress | 用于处理应用程序的进度状态的轻量级类。 |
| stlplus3 | C++ STL库,包含扩展的模板容器、可重用子系统、数据持久性和可移植组件。 |
| tiff | tiff图像库 |
| vectorGraphics | 矢量图形库 |
| zlib | 数据压缩用的库 |
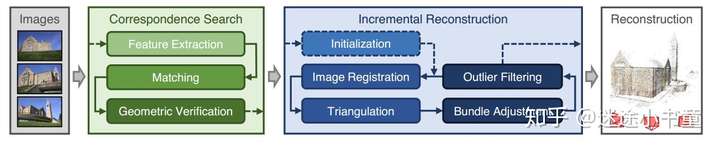
目前基本的 SfM 策略主要有2种,分别为增量式incremental和全局式global,如下图所示。增量式方法往往选择最优的种子像对建立初始场景(initialization),然后不添加新影像以扩展场景(image registration, triangulation, bundle adjustment),最后对整个场景光束法平差优化一次,调整所有相机的内、外参数和物方点(3D points)。而全局式方法是将输入所有影像,先同时解算相机的全局旋转矩阵(此过程称为rotation averaging),接着是全局平移矩阵(此过程称为translation averaging),再经前方交会(triangulation)初始化整个场景的物方点,最后对整个场景光束法平差,优化所有相机的内、外参数和物方点。一般而言,增量式方法多次光束法平差中会进行粗差探测与剔除(outlier filtering),整体较为鲁棒,缺点是时间效率低下且误差积累会产生场景偏移。而全局式方法整体同时解算,时间效率高,但严重依赖相对定向的质量,鲁棒性较差。

输入图像和相机数据库,输出sfm_data.json包含图像尺寸,焦距(单位像素)
$ openMVG_main_SfMInit_ImageListing -i ./ImageDataset_SceauxCastle/img -o ./ImageDataset_SceauxCastle/sfm_out -d /home/mitom/3DReconstruction/MVG_MVS/openMVG/src/openMVG/exif/sensor_width_database/sensor_width_camera_database.txt -c 3
/home/mitom/3DReconstruction/MVG_MVS/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_SfMInit_ImageListing -i /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/images -o /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out -d /home/mitom/3DReconstruction/MVG_MVS/openMVG/src/openMVG/exif/sensor_width_database/sensor_width_camera_database.txt -c 3
You called :
/home/mitom/3DReconstruction/MVG_MVS/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_SfMInit_ImageListing
--imageDirectory /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/images
--sensorWidthDatabase /home/mitom/3DReconstruction/MVG_MVS/openMVG/src/openMVG/exif/sensor_width_database/sensor_width_camera_database.txt
--outputDirectory /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out
--focal -1
--intrinsics
--camera_model 3
--group_camera_model 1
- Image listing -
0% 10 20 30 40 50 60 70 80 90 100%
|----|----|----|----|----|----|----|----|----|----|
***************************************************
SfMInit_ImageListing report:
listed #File(s): 11
usable #File(s) listed in sfm_data: 11
usable #Intrinsic(s) listed in sfm_data: 1
...
// The camera model was found in the database so we can compute it's approximated focal length
const double ccdw = datasheet.sensorSize_;
focal = std::max(width, height) * exifReader->getFocal() / ccdw;
...focal = max(w, h) * F / S
- F:相机焦距长度(focal length,单位毫米mm)
- w,h: 图片的宽高
- S: ccd传感器孔径(sensor size,单位mm)
enum EINTRINSIC
{
PINHOLE_CAMERA_START = 0,
PINHOLE_CAMERA, //无畸变
PINHOLE_CAMERA_RADIAL1, // 径向畸变K1
PINHOLE_CAMERA_RADIAL3, // 径向畸变K1,K2,K3
PINHOLE_CAMERA_BROWN, //径向畸变K1,K2,K3,切向畸变T1,T2
PINHOLE_CAMERA_FISHEYE, //具有4个畸变系数的简单鱼眼畸变模型
PINHOLE_CAMERA_END,
CAMERA_SPHERICAL = PINHOLE_CAMERA_END + 1
};// 初始化内参
width = height = ppx = ppy = focal = -1.0;
// ...
// 考虑手动提供焦点
if (sKmatrix.size() > 0) // 已知用户校准K矩阵
{
if (!checkIntrinsicStringValidity(sKmatrix, focal, ppx, ppy))
focal = -1.0;
}
else //用户提供的焦距值
if (focal_pixels != -1 )
focal = focal_pixels;
// 如果不是手动提供或错误提供
if (focal == -1)
{
std::unique_ptr<Exif_IO> exifReader(new Exif_IO_EasyExif);
//打开文件进行检查和分析返回bool
exifReader->open( sImageFilename );
//验证文件是否有元数据并且获取相机的型号不为空
const bool bHaveValidExifMetadata =
exifReader->doesHaveExifInfo()
&& !exifReader->getModel().empty();
//错误则报错,对则引用
if (bHaveValidExifMetadata) // If image contains meta data
{
const std::string sCamModel = exifReader->getModel();
// 处理焦距等于0的情况
if (exifReader->getFocal() == 0.0f)
{
error_report_stream
<< stlplus::basename_part(sImageFilename) << ": Focal length is missing." << "\n";
focal = -1.0;
}
else
// 在列表文件中创建图像条目
{
Datasheet datasheet;
if ( getInfo( sCamModel, vec_database, datasheet ))
{
// 在数据库中找到了相机模型,所以我们可以计算出它的近似焦距
const double ccdw = datasheet.sensorSize_;
focal = std::max ( width, height ) * exifReader->getFocal() / ccdw;
}
else
{
error_report_stream
<< stlplus::basename_part(sImageFilename)
<< "\" model \"" << sCamModel << "\" doesn't exist in the dataelse base" << "\n"
<< "Please consider add your camera model and sensor width in the database." << "\n";
}
}
}
}
//...
// 构建与图像对应的视图,若有gps权重时(就需要定义为优先旋转)
const std::pair<bool, Vec3> gps_info = checkGPS(sImageFilename, i_GPS_XYZ_method);
if (gps_info.first)
{
//Views的子类,可以选择是否优先旋转,或者优先调整位置
ViewPriors v(*iter_image, views.size(), views.size(), views.size(), width, height);
// 添加与图像相关的内部文件(如果有)
if (intrinsic == nullptr)
{
//因为视图具有无效的内部数据
//(使用无效的内在字段值导出视图)
v.id_intrinsic = UndefinedIndexT;
}
else
{
// Add the defined intrinsic to the sfm_container
intrinsics[v.id_intrinsic] = intrinsic;
}
v.b_use_pose_center_ = true;
v.pose_center_ = gps_info.second;
//先前的权重
if (prior_w_info.first == true)
{
v.center_weight_ = prior_w_info.second;
}
//将视图添加到sfm容器
views[v.id_view] = std::make_shared<ViewPriors>(v);
}
// 没有gps信息时
else
{
View v(*iter_image, views.size(), views.size(), views.size(), width, height);
// Add intrinsic related to the image (if any)
if (intrinsic == nullptr)
{
//Since the view have invalid intrinsic data
// (export the view, with an invalid intrinsic field value)
v.id_intrinsic = UndefinedIndexT;
}
else
{
// Add the defined intrinsic to the sfm_container
intrinsics[v.id_intrinsic] = intrinsic;
}
// Add the view to the sfm_container
views[v.id_view] = std::make_shared<View>(v);
}
// ...
// 保存则将sfm_data的数据命名并保存到output文件当中
Save( sfm_data, stlplus::create_filespec( sOutputDir, "sfm_data.json" ).c_str(), ESfM_Data(VIEWS|INTRINSICS))
/* 11张Demo图片不做gps约束因此不需要增加提前的pose */{
...,
"views":{
"key": 10, // 视角(图像)编号
"value": {
"polymorphic_id": 1073741824,
"ptr_wrapper": {
"id": 2147483659,
"data": {
"local_path": "",
"filename": "100_7110.JPG",
"width": 2832,
"height": 2128,
"id_view": 10,
"id_intrinsic": 0,
"id_pose": 10
}
}
}
},
"intrinsics": [
{
"key": 0,
"value": {
"polymorphic_id": 2147483649,
"polymorphic_name": "pinhole_radial_k3", // 内参k1,k2,k2*/
"ptr_wrapper": {
"id": 2147483660,
"data": {
"width": 2832,
"height": 2128,
"focal_length": 2884.2617914205145, // 焦长(单位像素)
"principal_point": [
1416.0,
1064.0
],
"disto_k3": [
0.0,
0.0,
0.0
]
}
}
}
}
], ...
}特征提取,对给定的图像描述sfm_data.json,对于每个视图,计算特征描述,并存储.feat和.desc文件
$ openMVG_main_ComputeFeatures -i ./ImageDataset_SceauxCastle/sfm_out/sfm_data.json -o ./ImageDataset_SceauxCastle/sfm_out/matches -m SIFT -f 1 -n 8
/home/mitom/3DReconstruction/MVG_MVS/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_ComputeFeatures -i /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/sfm_data.json -o /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/matches -m SIFT -f 1 -n 10
You called :
/home/mitom/3DReconstruction/MVG_MVS/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_ComputeFeatures
--input_file /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/sfm_data.json
--outdir /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/matches
--describerMethod SIFT
--upright 0
--describerPreset NORMAL
--force 1
--numThreads 10
- EXTRACT FEATURES -
0% 10 20 30 40 50 60 70 80 90 100%
|----|----|----|----|----|----|----|----|----|----|
***************************************************
Task done in (s): 22
struct SfM_Data
{
Views views; /// 储存影像物理性质、索引号等基本信息
Poses poses; /// 储存影像外参数,包括旋转矩阵、平移矩阵(相机姿态)
Intrinsics intrinsics; /// 储存影像内参数,支持多组不同内参数(相机内参)
Landmarks structure; /// 物方点信息,物方点坐标及其tracks(二维视图特征关联的3D点)
/*
定义由TrackId索引的地标集合,Landmark包含两个成员,
3d点及其所对应于图像上的坐标的hash表,
因为一个世界中的坐标可以被多张相机所观测到。
Landmarks点位又分为三角测量获得的点(用于BA)和地面控制点(用于GCP)
*/
}std::string sSfM_Data_Filename; //main_SfMInit_ImageListing生成的文件的路径
std::string sOutDir = ""; //输出文件夹
bool bUpRight = false; //AKAZE描述子使用,是否计算方向
std::string sImage_Describer_Method = "SIFT_ANATOMY"; //使用的描述子
bool bForce = false; //
std::string sFeaturePreset = ""; //描述子质量NORMAL,HIGH,ULTRA// 设置好描述子类型与描述子质量后,导出用于动态未来区域计算和/或加载的所用图像描述符和区域类型
std::ofstream stream(sImage_describer.c_str());
if (!stream.is_open())
return EXIT_FAILURE;
cereal::JSONOutputArchive archive(stream);
archive(cereal::make_nvp("image_describer", image_describer));
auto regionsType = image_describer->Allocate();
archive(cereal::make_nvp("regions_type", regionsType));// 初始化每个视角
Views::const_iterator iterViews = sfm_data.views.begin();
std::advance(iterViews, i);
const View * view = iterViews->second.get();
// ...
// 创建两个文件,XXX.feat,XXX.desc
const std::string
sView_filename = stlplus::create_filespec(sfm_data.s_root_path, view->s_Img_path),
sFeat = stlplus::create_filespec(sOutDir, stlplus::basename_part(sView_filename), "feat"),
sDesc = stlplus::create_filespec(sOutDir, stlplus::basename_part(sView_filename), "desc");
// If features or descriptors file are missing, compute them
if (!preemptive_exit && (bForce || !stlplus::file_exists(sFeat) || !stlplus::file_exists(sDesc)))
{
if (!ReadImage(sView_filename.c_str(), &imageGray))
continue;
// 查看是否有遮挡特征mask,见官方文档,解释非常详细
Image<unsigned char> * mask = nullptr; // The mask is null by default
const std::string
mask_filename_local =
stlplus::create_filespec(sfm_data.s_root_path,
stlplus::basename_part(sView_filename) + "_mask", "png"),
mask__filename_global =
stlplus::create_filespec(sfm_data.s_root_path, "mask", "png");
Image<unsigned char> imageMask;
// Try to read the local mask
if (stlplus::file_exists(mask_filename_local))
{
if (!ReadImage(mask_filename_local.c_str(), &imageMask))
{
std::cerr << "Invalid mask: " << mask_filename_local << std::endl
<< "Stopping feature extraction." << std::endl;
preemptive_exit = true;
continue;
}
// Use the local mask only if it fits the current image size
// 仅当本地mask符合当前图像大小时使用
if (imageMask.Width() == imageGray.Width() && imageMask.Height() == imageGray.Height())
mask = &imageMask;
}
else
{
// 全局mask
// Try to read the global mask
if (stlplus::file_exists(mask__filename_global))
{
if (!ReadImage(mask__filename_global.c_str(), &imageMask))
{
std::cerr << "Invalid mask: " << mask__filename_global << std::endl
<< "Stopping feature extraction." << std::endl;
preemptive_exit = true;
continue;
}
// Use the global mask only if it fits the current image size
if (imageMask.Width() == imageGray.Width() && imageMask.Height() == imageGray.Height())
mask = &imageMask;
}
}
// 计算特征和描述符并将它们导出到文件中(核心)
// Compute features and descriptors and export them to files
auto regions = image_describer->Describe(imageGray, mask);
if (regions && !image_describer->Save(regions.get(), sFeat, sDesc)) {
std::cerr << "Cannot save regions for images: " << sView_filename << std::endl
<< "Stopping feature extraction." << std::endl;
preemptive_exit = true;
continue;
}
// ...
}
// 特征计算可以使用多线程,计算速度会更快,建议使用机器线程1/2,不然内存out
- 加载视图图像描述(区域:特征和描述符)
- 计算假定的局部特征匹配(描述符匹配)
- 计算几何相干特征匹配(基于假定匹配的稳健模型估计)
- 导出计算数据
$ openMVG_main_ComputeMatches -i ./ImageDataset_SceauxCastle/sfm_out/sfm_data.json -o ./ImageDataset_SceauxCastle/sfm_out/matches -f 1 -n ANNL2
/home/mitom/Music/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_ComputeMatches /home/mitom/3DReconstruction/MVG_MVS/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_ComputeFeatures -i /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/sfm_data.json -o /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/matches -f 1 -n ANNL2
You called :
/home/mitom/Music/openMVG/src/cmake-build-debug/Linux-x86_64-Debug/openMVG_main_ComputeMatches
--input_file /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/sfm_data.json
--out_dir /home/mitom/3DReconstruction/MVG_MVS/data/ImageDataset_SceauxCastle/sfm_out/matches
Optional parameters:
--force 1
--ratio 0.8
--geometric_model f
--video_mode_matching -1
--pair_list
--nearest_matching_method ANNL2
--guided_matching 0
--cache_size unlimited
- Regions Loading -
0% 10 20 30 40 50 60 70 80 90 100%
|----|----|----|----|----|----|----|----|----|----|
***************************************************
- PUTATIVE MATCHES -
Use: exhaustive pairwise matching
Using ANN_L2 matcher
Using the OPENMP thread interface
- Matching -
0% 10 20 30 40 50 60 70 80 90 100%
|----|----|----|----|----|----|----|----|----|----|
***************************************************
Task (Regions Matching) done in (s): 48
- Geometric filtering -
0% 10 20 30 40 50 60 70 80 90 100%
|----|----|----|----|----|----|----|----|----|----|
***************************************************
Task done in (s): 71
Graph statistics:
#nodes: 11
#cc: 1
#singleton: 0
Node degree statistics: min: 10, max: 10, mean: 10, median: 10
Export Adjacency Matrix of the pairwise's geometric matches
// 文件名
std::string sSfM_Data_Filename;
// 输出文件夹
std::string sMatchesDirectory = "";
// 几何模型
std::string sGeometricModel = "f";
//enum EGeometricModel
//{
// FUNDAMENTAL_MATRIX = 0,基本矩阵
// ESSENTIAL_MATRIX = 1,本质矩阵
// HOMOGRAPHY_MATRIX = 2,单应矩阵
// ESSENTIAL_MATRIX_ANGULAR = 3,基本矩阵角
// ESSENTIAL_MATRIX_ORTHO = 4,基本正交矩阵
// ESSENTIAL_MATRIX_UPRIGHT = 5基本矩阵直立
//};
// f距离比
float fDistRatio = 0.8f;
// 配对模型
int iMatchingVideoMode = -1;
//enum EPairMode
//{
// PAIR_EXHAUSTIVE = 0,全部配对
// PAIR_CONTIGUOUS = 1,相邻配对
// PAIR_FROM_FILE = 2从文件选择配对方法
//};
// 从文件的匹配文件的路径
std::string sPredefinedPairList = "";
// 匹配器
std::string sNearestMatchingMethod = "AUTO";
// 是否重新全部配对,不使用之前已经计算出的成果
bool bForce = false;
// 函数Robust_model_estimation中讲解
bool bGuided_matching = false;
// funtor GeometricFilter_FMatrix_AC中讲解
int imax_iteration = 2048;
// 0->默认区域提供程序(在内存中加载和存储所有区域)
// other->缓存区域提供程序(按需加载和存储区域)
unsigned int ui_max_cache_size = 0;a. 计算描述子匹配
// 加载SfM_Data
SfM_Data sfm_data;
if (!Load(sfm_data, sSfM_Data_Filename, ESfM_Data(VIEWS|INTRINSICS)))
{
std::cerr << std::endl
<< "The input SfM_Data file \""<< sSfM_Data_Filename << "\" cannot be read." << std::endl;
return EXIT_FAILURE;
}
// 匹配的描述子初始化
using namespace openMVG::features;
const std::string sImage_describer = stlplus::create_filespec(sMatchesDirectory, "image_describer", "json");
std::unique_ptr<Regions> regions_type = Init_region_type_from_file(sImage_describer);
if (!regions_type)
{
std::cerr << "Invalid: "
<< sImage_describer << " regions type file." << std::endl;
return EXIT_FAILURE;
}
//开始进行匹配,匹配方式有三种,第一部分有说明
//加载相应的视图区域
std::shared_ptr<Regions_Provider> regions_provider;
//Regions_Provider抽象区域提供程序允许加载和返回与视图相关的区域
if (ui_max_cache_size == 0)
//默认区域提供程序(在内存中加载和存储所有区域)
regions_provider = std::make_shared<Regions_Provider>();
else
//缓存区域提供程序(按需加载和存储区域)
regions_provider = std::make_shared<Regions_Provider_Cache>(ui_max_cache_size);
// 读取区域类型
C_Progress_display progress;
if (!regions_provider->load(sfm_data, sMatchesDirectory, regions_type, &progress))
{
std::cerr << std::endl << "Invalid regions." << std::endl;
return EXIT_FAILURE;
}
// 读取图片的基本信息名称以及宽高
//从SfM数据视图数据生成一些别名:
//-将视图列为文件名和图像大小的矢量
std::vector<std::string> vec_fileNames;
std::vector<std::pair<size_t, size_t>> vec_imagesSize;
{
//reserve预留空间
vec_fileNames.reserve(sfm_data.GetViews().size());
vec_imagesSize.reserve(sfm_data.GetViews().size());
for (Views::const_iterator iter = sfm_data.GetViews().begin();
iter != sfm_data.GetViews().end();
++iter)
{
const View * v = iter->second.get();
vec_fileNames.push_back(stlplus::create_filespec(sfm_data.s_root_path,
v->s_Img_path));
vec_imagesSize.push_back( std::make_pair( v->ui_width, v->ui_height));
}
}
/***
* 提供了三种图片匹配方式:
全部、相邻、从文件;
以及7种描述子匹配方式:
AUTO、BRUTEFORCEL2、BRUTEFORCEHAMMING、HNSWL2、
ANNL2、CASCADEHASHINGL2、FASTCASCADEHASHINGL2
这段代码是,读取之前处理好的,以及选择图片匹配方式,以及描述子匹配方式,还没有开始计算。
*/
PairWiseMatches map_PutativesMatches;
std::cout << std::endl << " - PUTATIVE MATCHES - " << std::endl;
//如果匹配项已经存在,请重新加载它们,使用bForce开启是否重新加载
if (!bForce && (stlplus::file_exists(sMatchesDirectory + "/matches.putative.txt")
|| stlplus::file_exists(sMatchesDirectory + "/matches.putative.bin")))
{
if (!(Load(map_PutativesMatches, sMatchesDirectory + "/matches.putative.bin") ||
Load(map_PutativesMatches, sMatchesDirectory + "/matches.putative.txt")) )
{
std::cerr << "Cannot load input matches file";
return EXIT_FAILURE;
}
std::cout << "\t PREVIOUS RESULTS LOADED;" << " #pair: " << map_PutativesMatches.size() << std::endl;
}
else // Compute the putative matches
{
std::cout << "Use: ";
switch (ePairmode)
{
case PAIR_EXHAUSTIVE: std::cout << "exhaustive pairwise matching" << std::endl; break;
case PAIR_CONTIGUOUS: std::cout << "sequence pairwise matching" << std::endl; break;
case PAIR_FROM_FILE: std::cout << "user defined pairwise matching" << std::endl; break;
}
//Allocate the right Matcher according the Matching requested method
//根据匹配请求的方法分配正确的匹配器
//Matcher一个图像采集匹配器的实现计算一组图片之间的假定匹配
std::unique_ptr<Matcher> collectionMatcher;
if (sNearestMatchingMethod == "AUTO")
{
//BRUTE_FORCE_L2,蛮力L2,
//ANN_L2,安L2,
//CASCADE_HASHING_L2,级联哈希L2,
//HNSW_L2,
//BRUTE_FORCE_HAMMING暴力汉明
if (regions_type->IsScalar())//标量
{
std::cout << "Using FAST_CASCADE_HASHING_L2 matcher" << std::endl;
//reset智能指针指向的新对象
//从SfM数据视图数据构建一些别名:将视图列为文件名和图像大小的向量
//
//Cascade_Hashing_Matcher_Regions一个图像采集匹配器的实现计算一组图片之间的
//假定匹配通过使用两个最近邻居的距离比的阈值丢弃虚假的对应。
//使用级联哈希匹配级联哈希表计算一次并用于所有区域。
collectionMatcher.reset(new Cascade_Hashing_Matcher_Regions(fDistRatio));
}
else{
if (regions_type->IsBinary())//二进制的
{
std::cout << "Using BRUTE_FORCE_HAMMING matcher" << std::endl;
//Matcher_Regions
//一个图像采集匹配器的实现计算一组图片之间的假定匹配通过使用两个最近邻居的距离比的阈值丢弃虚假的对应。
collectionMatcher.reset(new Matcher_Regions(fDistRatio, BRUTE_FORCE_HAMMING));
}
}
}
else
if (sNearestMatchingMethod == "BRUTEFORCEL2")
{
std::cout << "Using BRUTE_FORCE_L2 matcher" << std::endl;
collectionMatcher.reset(new Matcher_Regions(fDistRatio, BRUTE_FORCE_L2));
}
else
if (sNearestMatchingMethod == "BRUTEFORCEHAMMING")
{
std::cout << "Using BRUTE_FORCE_HAMMING matcher" << std::endl;
collectionMatcher.reset(new Matcher_Regions(fDistRatio, BRUTE_FORCE_HAMMING));
}
else
if (sNearestMatchingMethod == "HNSWL2")
{
std::cout << "Using HNSWL2 matcher" << std::endl;
collectionMatcher.reset(new Matcher_Regions(fDistRatio, HNSW_L2));
}
else
if (sNearestMatchingMethod == "ANNL2")
{
std::cout << "Using ANN_L2 matcher" << std::endl;
collectionMatcher.reset(new Matcher_Regions(fDistRatio, ANN_L2));
}
else
if (sNearestMatchingMethod == "CASCADEHASHINGL2")
{
std::cout << "Using CASCADE_HASHING_L2 matcher" << std::endl;
collectionMatcher.reset(new Matcher_Regions(fDistRatio, CASCADE_HASHING_L2));
}
else
if (sNearestMatchingMethod == "FASTCASCADEHASHINGL2")
{
std::cout << "Using FAST_CASCADE_HASHING_L2 matcher" << std::endl;
collectionMatcher.reset(new Cascade_Hashing_Matcher_Regions(fDistRatio));
}
if (!collectionMatcher)
{
std::cerr << "Invalid Nearest Neighbor method: " << sNearestMatchingMethod << std::endl;
}
return EXIT_FAILURE;
}
// 这里才开始正式计算,以及进行保存,以及匹配表示图,数据里面那个三角一样的图,越密集则BA越困难。
// Perform the matching
system::Timer timer;
{
// From matching mode compute the pair list that have to be matched:
Pair_Set pairs;
switch (ePairmode)
{
case PAIR_EXHAUSTIVE: pairs = exhaustivePairs(sfm_data.GetViews().size()); break;
case PAIR_CONTIGUOUS: pairs = contiguousWithOverlap(sfm_data.GetViews().size(), iMatchingVideoMode); break;
case PAIR_FROM_FILE:
if (!loadPairs(sfm_data.GetViews().size(), sPredefinedPairList, pairs))
{
return EXIT_FAILURE;
}
break;
}
// Photometric matching of putative pairs
//假设对的照片匹配
collectionMatcher->Match(regions_provider, pairs, map_PutativesMatches, &progress);
//---------------------------------------
//-- Export putative matches导出假定匹配
//---------------------------------------
if (!Save(map_PutativesMatches, std::string(sMatchesDirectory + "/matches.putative.bin")))
{
std::cerr
<< "Cannot save computed matches in: "
<< std::string(sMatchesDirectory + "/matches.putative.bin");
return EXIT_FAILURE;
}
}
std::cout << "Task (Regions Matching) done in (s): " << timer.elapsed() << std::endl;
//-- export putative matches Adjacency matrix
//导出假定匹配邻接矩阵
PairWiseMatchingToAdjacencyMatrixSVG(vec_fileNames.size(),
map_PutativesMatches,
stlplus::create_filespec(sMatchesDirectory, "PutativeAdjacencyMatrix", "svg"));
//-- export view pair graph once putative graph matches have been computed
//一旦计算出假定的图匹配,就导出视图对图
{
std::set<IndexT> set_ViewIds;
std::transform(sfm_data.GetViews().begin(), sfm_data.GetViews().end(),
std::inserter(set_ViewIds, set_ViewIds.begin()), stl::RetrieveKey());
graph::indexedGraph putativeGraph(set_ViewIds, getPairs(map_PutativesMatches));
graph::exportToGraphvizData(stlplus::create_filespec(sMatchesDirectory, "putative_matches"),putativeGraph);
}
b. 计算里程计
有了图像之间描述子的匹配,按测绘的角度来说就可以后方交会了,这里便是计算里程计的流程,并且提供了滤波去除了部分粗差。
/**这里ImageCollectionGeometricFilter类承担了计算里程计的任务,提供了6种方法进行计算:
HOMOGRAPHY_MATRIX、FUNDAMENTAL_MATRIX、ESSENTIAL_MATRIX、
ESSENTIAL_MATRIX_ANGULAR、ESSENTIAL_MATRIX_ORTHO、ESSENTIAL_MATRIX_UPRIGHT
各种方式的优点缺点见论文
*/
//ImageCollectionGeometricFilter
//只允许保持几何一致的匹配
//它丢弃了不能产生有效鲁棒模型估计的对
std::unique_ptr<ImageCollectionGeometricFilter> filter_ptr(new ImageCollectionGeometricFilter(&sfm_data, regions_provider));
if (filter_ptr)
{
system::Timer timer;
const double d_distance_ratio = 0.6;
PairWiseMatches map_GeometricMatches;
switch (eGeometricModelToCompute)
{
case HOMOGRAPHY_MATRIX:
{
const bool bGeometric_only_guided_matching = true;
filter_ptr->Robust_model_estimation(
GeometricFilter_HMatrix_AC(4.0, imax_iteration),
map_PutativesMatches, bGuided_matching,
bGeometric_only_guided_matching ? -1.0 : d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
}
break;
case FUNDAMENTAL_MATRIX:
{
filter_ptr->Robust_model_estimation(
GeometricFilter_FMatrix_AC(4.0, imax_iteration),
map_PutativesMatches, bGuided_matching, d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
}
break;
case ESSENTIAL_MATRIX:
{
filter_ptr->Robust_model_estimation(
GeometricFilter_EMatrix_AC(4.0, imax_iteration),
map_PutativesMatches, bGuided_matching, d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
//-- Perform an additional check to remove pairs with poor overlap
//执行附加检查以移除重叠不良的对
std::vector<PairWiseMatches::key_type> vec_toRemove;
for (const auto & pairwisematches_it : map_GeometricMatches)
{
const size_t putativePhotometricCount = map_PutativesMatches.find(pairwisematches_it.first)->second.size();
const size_t putativeGeometricCount = pairwisematches_it.second.size();
const float ratio = putativeGeometricCount / static_cast<float>(putativePhotometricCount);
if (putativeGeometricCount < 50 || ratio < .3f)
{
// the pair will be removed
vec_toRemove.push_back(pairwisematches_it.first);
}
}
//-- remove discarded pairs
for (const auto & pair_to_remove_it : vec_toRemove)
{
map_GeometricMatches.erase(pair_to_remove_it);
}
}
break;
case ESSENTIAL_MATRIX_ANGULAR:
{
filter_ptr->Robust_model_estimation(
GeometricFilter_ESphericalMatrix_AC_Angular<false>(4.0, imax_iteration),
map_PutativesMatches, bGuided_matching, d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
}
break;
case ESSENTIAL_MATRIX_ORTHO:
{
filter_ptr->Robust_model_estimation(
GeometricFilter_EOMatrix_RA(2.0, imax_iteration),
map_PutativesMatches, bGuided_matching, d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
}
break;
case :
{
filter_ptr->Robust_model_estimation(
GeometricFilter_ESphericalMatrix_AC_Angular<true>(4.0, imax_iteration),
map_PutativesMatches, bGuided_matching, d_distance_ratio, &progress);
map_GeometricMatches = filter_ptr->Get_geometric_matches();
}
break;
}
// 对里程点文件的导出保存
//---------------------------------------
//-- Export geometric filtered matches
//导出几何过滤匹配
//---------------------------------------
if (!Save(map_GeometricMatches, std::string(sMatchesDirectory + "/" + sGeometricMatchesFilename)))
{
std::cerr
<< "Cannot save computed matches in: "
<< std::string(sMatchesDirectory + "/" + sGeometricMatchesFilename);
return EXIT_FAILURE;
}
std::cout << "Task done in (s): " << timer.elapsed() << std::endl;
// -- export Geometric View Graph statistics
//导出几何视图图形统计信息
graph::getGraphStatistics(sfm_data.GetViews().size(), getPairs(map_GeometricMatches));
//-- export Adjacency matrix
//导出邻接矩阵
std::cout << "\n Export Adjacency Matrix of the pairwise's geometric matches" << std::endl;
PairWiseMatchingToAdjacencyMatrixSVG(vec_fileNames.size(), map_GeometricMatches,
stlplus::create_filespec(sMatchesDirectory, "GeometricAdjacencyMatrix", "svg"));
//-- export view pair graph once geometric filter have been done
// 完成几何过滤后导出视图对图
{
std::set<IndexT> set_ViewIds;
std::transform(sfm_data.GetViews().begin(), sfm_data.GetViews().end(),
std::inserter(set_ViewIds, set_ViewIds.begin()), stl::RetrieveKey());
graph::indexedGraph putativeGraph(set_ViewIds, getPairs(map_GeometricMatches));
graph::exportToGraphvizData(
stlplus::create_filespec(sMatchesDirectory, "geometric_matches"), putativeGraph);
}
template<typename GeometryFunctor>
void ImageCollectionGeometricFilter::Robust_model_estimation
(
const GeometryFunctor & functor,
//functor文中使用的是GeometricFilter_HMatrix_AC等等(后面讲解)
const PairWiseMatches & putative_matches,
//PairWiseMatches继承于std::map<Pair, IndMatches>
//IndMatches是std::vector<matching::IndMatch>
//matching::IndMatch是结构以保存成对索引的引用,存在排序运算符以删除IndMatch序列的重复项。
//也就是放入匹配点的数据结构
const bool b_guided_matching,
const double d_distance_ratio,
C_Progress * my_progress_bar
//进度条
)
{
if (!my_progress_bar)
my_progress_bar = &C_Progress::dummy();
my_progress_bar->restart( putative_matches.size(), "\n- Geometric filtering -\n" );
#ifdef OPENMVG_USE_OPENMP
#pragma omp parallel for schedule(dynamic)
#endif
for (int i = 0; i < (int)putative_matches.size(); ++i)
{
if (my_progress_bar->hasBeenCanceled())
continue;
auto iter = putative_matches.begin();
advance(iter,i);
Pair current_pair = iter->first;
const std::vector<IndMatch> & vec_PutativeMatches = iter->second;
//-- Apply the geometric filter (robust model estimation)
{
IndMatches putative_inliers;
GeometryFunctor geometricFilter = functor; // use a copy since we are in a multi-thread context
if (geometricFilter.Robust_estimation(
sfm_data_,
regions_provider_,
iter->first,
vec_PutativeMatches,
putative_inliers))
{
if (b_guided_matching)
{
IndMatches guided_geometric_inliers;
geometricFilter.Geometry_guided_matching(
sfm_data_,
regions_provider_,
iter->first,
d_distance_ratio,
guided_geometric_inliers);
//std::cout
// << "#before/#after: " << putative_inliers.size()
// << "/" << guided_geometric_inliers.size() << std::endl;
std::swap(putative_inliers, guided_geometric_inliers);
}
#ifdef OPENMVG_USE_OPENMP
#pragma omp critical
#endif
{
_map_GeometricMatches.insert( {current_pair, std::move(putative_inliers)});
}
}
}
++(*my_progress_bar);
}
}
}全局运动恢复结构
$std::string sSfM_Data_Filename{"../img_list_output/sfm_data.json"};
//sfm_data.json路径
std::string sMatchesDir{"../feature_output"},
//几何匹配的路径
sMatchFilename{"matches.f.bin"};
//匹配的文件名
std::string sOutDir{"../sfm_output"};
//输出路径
int iRotationAveragingMethod = int (ROTATION_AVERAGING_L2);
//参数:设置旋转平均法
int iTranslationAveragingMethod = int (TRANSLATION_AVERAGING_SOFTL1);
//参数:设置转换平均法
std::string sIntrinsic_refinement_options = "ADJUST_ALL";
//参数: 内在参数,用于控制哪一个摄像机参数必须被视为保持不变的变量以进行非线性细化的类型
//NONE 固有参数将被视为固定参数
//ADJUST_FOCAL_LENGTH 焦距将被视为细化的变量
//ADJUST_PRINCIPAL_POINT 将主点视为细化变量
//ADJUST_DISTORTION 畸变参数将被视为细化的变量
//ADJUST_ALL 所有参数将被视为细化变量// iRotationAveragingMethod
if (iRotationAveragingMethod < ROTATION_AVERAGING_L1 ||
iRotationAveragingMethod > ROTATION_AVERAGING_L2 )
//判定iRotationAveragingMethod可用
// intrinsic_refinement_options
const cameras::Intrinsic_Parameter_Type intrinsic_refinement_options =
cameras::StringTo_Intrinsic_Parameter_Type(sIntrinsic_refinement_options);
//设置相机内参矩阵参数并判定(判定略)
// sfm_data读取
SfM_Data sfm_data;
if (!Load(sfm_data, sSfM_Data_Filename, ESfM_Data(VIEWS|INTRINSICS)))
// sImage_describer从图像描述符文件初始化区域类型(用于图像区域提取)
using namespace openMVG::features;
const std::string sImage_describer = stlplus::create_filespec
(sMatchesDir, "image_describer", "json");
std::unique_ptr<Regions> regions_type = Init_region_type_from_file(sImage_describer);
//feats_provider特征读取
std::shared_ptr<Features_Provider> feats_provider = std::make_shared<Features_Provider>();
if (!feats_provider->load(sfm_data, sMatchesDir, regions_type))
// matches_provider匹配读取
std::shared_ptr<Matches_Provider> matches_provider = std::make_shared<Matches_Provider>();
if (
!(matches_provider->load(sfm_data, sMatchFilename) ||
matches_provider->load(sfm_data, stlplus::create_filespec(sMatchesDir, "matches.e.txt")) ||
matches_provider->load(sfm_data, stlplus::create_filespec(sMatchesDir, "matches.e.bin")))
)
// 输出文件夹判定// sfmEngine建立(sfmdata,输出路径,输出路径+Reconstruction_Report.html)
GlobalSfMReconstructionEngine_RelativeMotions sfmEngine(sfm_data, sOutDir,
stlplus::create_filespec(sOutDir, "Reconstruction_Report.html"));
// 配置特征与匹配feats_provider,matches_provider
sfmEngine.SetFeaturesProvider(feats_provider.get());
sfmEngine.SetMatchesProvider(matches_provider.get());
// 配置重建参数intrinsic_refinement_options
sfmEngine.Set_Intrinsics_Refinement_Type(intrinsic_refinement_options);
// 配置运动平均方法iRotationAveragingMethod,intrinsic_refinement_options
sfmEngine.SetRotationAveragingMethod(ERotationAveragingMethod(iRotationAveragingMethod));
sfmEngine.SetTranslationAveragingMethod(ETranslationAveragingMethod(iTranslationAveragingMethod));
// BA开始
if (sfmEngine.Process()) //进行计算的函数
{
std::cout << std::endl << " Total Ac-Global-Sfm took (s): " << timer.elapsed() << std::endl;
//输出报告
std::cout << "...Generating SfM_Report.html" << std::endl;
Generate_SfM_Report(sfmEngine.Get_SfM_Data(),
stlplus::create_filespec(sOutDir, "SfMReconstruction_Report.html"));
//导出计算场景(数据和可视化结果)
std::cout << "...Export SfM_Data to disk." << std::endl;
Save(sfmEngine.Get_SfM_Data(), stlplus::create_filespec(sOutDir, "sfm_data", ".bin"), ESfM_Data(ALL));
Save(sfmEngine.Get_SfM_Data(), stlplus::create_filespec(sOutDir, "cloud_and_poses", ".ply"), ESfM_Data(ALL));
//ESfM_Data说明
//VIEWS = 1,
//EXTRINSICS = 2,
//INTRINSICS = 4,
//STRUCTURE = 8,
//CONTROL_POINTS = 16,
//ALL = VIEWS | EXTRINSICS | INTRINSICS | STRUCTURE | CONTROL_POINTS
return EXIT_SUCCESS;
}