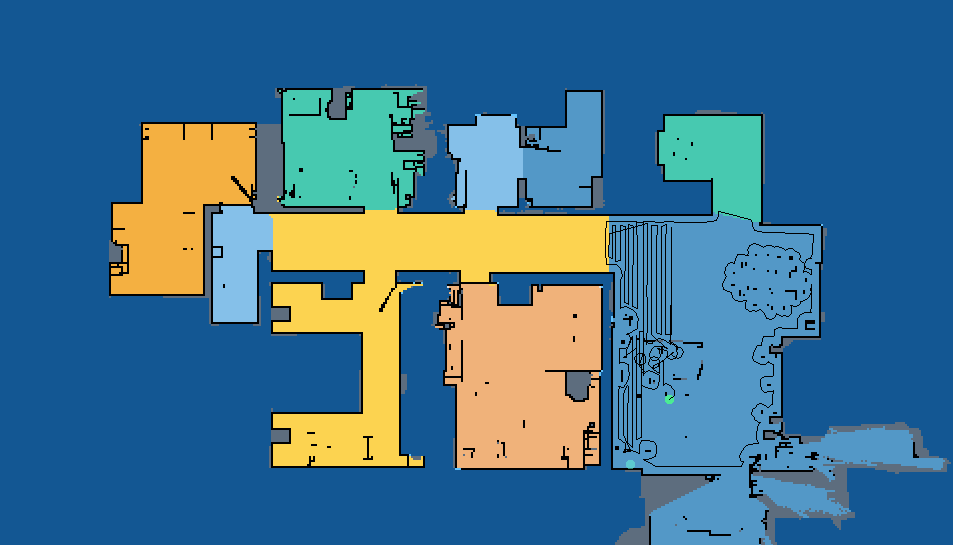
This custom integration provides a way to present a live view of a map for a Xiaomi vacuum.

Using HACS (recommended)
This integration can be added to HACS as a custom repository:
- URL:
https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor - Category:
Integration
After adding a custom repository you can use HACS to install this integration using user interface.
To install this integration manually you have to download following files:
to config/custom_components/xiaomi_cloud_map_extractor directory:
mkdir -p custom_components/xiaomi_cloud_map_extractor
cd custom_components/xiaomi_cloud_map_extractor
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/camera.py
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/const.py
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/image_handler.py
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/manifest.json
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/map_data_parser.py
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/raw/master/custom_components/xiaomi_cloud_map_extractor/xiaomi_cloud_connector.py| Key | Type | Required | Value | Description |
|---|---|---|---|---|
platform |
string | true | xiaomi_cloud_map_extractor |
Name of a platform |
host |
string | true | 192.168.0.123 |
IP address of a vacuum |
token |
string | true | ghjhca3ykg8o2zyyj7xb5adamhgsypel |
Token of a vacuum |
username |
string | true | [email protected] |
Username (email or user ID) used to connect to Xiaomi cloud. |
password |
string | true | aVerySecretPassword |
Password used to connect to Xiaomi cloud |
name |
string | false | Desired name of camera entity | |
country |
string | false | One of: ru, us, tw, sg, cn, de |
Server used in Xiaomi cloud. Leave empty if you are not sure. |
colors |
map | false | Colors configuration (see below) | |
room_colors |
map | false | Room colors configuration (see below) | |
draw |
list | false | List of elements to draw on a map (see below) | |
texts |
list | false | List of texts to draw on a map (see below) | |
map_transformation |
map | false | Parameters of map transformation (see below) | |
sizes |
map | false | Sizes of map's elements (see below) | |
attributes |
list | false | List of desired entity attributes (see below) | |
scan_interval |
interval | false | default: 5 seconds |
Interval between map updates (documentation) |
auto_update |
boolean | false | default: true |
Activation/deactivation of automatic map updates. If disabled use service homeassistant.update_entity to update map manually. |
Each color is represented by a list of 3 or 4 parameters: [red, green, blue] or [red, green, blue, alpha].
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.

| Color name | Description |
|---|---|
color_map_inside |
Map inside (for software without rooms support) |
color_map_outside |
Map outside |
color_map_wall |
Walls (for software without rooms support) |
color_map_wall_v2 |
Walls (for software with rooms support) |
color_grey_wall |
Obstacles (e.g. chairs, table legs) |
color_path |
Path of a vacuum |
color_goto_path |
Path for goto mode |
color_predicted_path |
Predicted path to a point in goto mode |
color_zones |
Fill of areas selected for zoned cleaning |
color_zones_outline |
Outline of areas selected for zoned cleaning |
color_virtual_walls |
Virtual walls |
color_no_go_zones |
Fill of no-go zones |
color_no_go_zones_outline |
Outline of no-go zones |
color_no_mop_zones |
Fill of no-mopping zones |
color_no_mop_zones_outline |
Outline of no-mopping zones |
color_charger |
Charger position |
color_robo |
Vacuum position |
color_scan |
Areas not assigned to any room (for software with rooms support) |
color_unknown |
Other areas |
This section contains mapping between room numbers and colors.
Each color is represented by a list of 3 or 4 parameters: [red, green, blue] or [red, green, blue, alpha].
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.
A list of features to be drawn on a map. If all features should be drawn it can be replaced with:
draw: ["all"]Available values:
chargerpathgoto_pathpredicted_pathno_go_zonesno_mopping_zonesvacuum_positionvirtual_wallszones
Each list entry must obey a following schema. You can get a list of available fonts by executing this command:
fc-list | grep ttf | sed "s/.*\///"| sed "s/ttf.*/ttf/"| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
text |
string | true | Text to draw on a map | |
x |
float | true | X position of a text (in percents) | |
y |
float | true | Y position of a text (in percents) | |
color |
list | false | black | Desired color of a text, formatted like here |
font |
string | false | Name of a font to use | |
font_size |
int | false | Size of a font |
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
scale |
float | false | 1 | Scaling factor for a map. |
rotate |
integer | false | 0 | Angle of map rotation. Available values: [0, 90, 180, 270] |
trim |
map | false | 0 | Map trimming configuration. Each trimming direction is in percents: value 25 means trimming of quarter in a given dimension. Available keys: [left, right, top, bottom] |
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
charger_radius |
float | false | 4 | Radius of a charger circle. |
vacuum_radius |
float | false | 4 | Radius of a vacuum circle. |
A list of attributes that an entity should have. Available values:
-
calibration_points- Calculated calibration points for Lovelace Xiaomi Vacuum Map card.
-
charger -
goto -
goto_path -
goto_predicted_path -
image -
is_empty -
map_name -
no_go_areas -
no_mopping_areas -
obstacles -
path -
room_numbers -
rooms -
vacuum_position -
vacuum_room -
walls -
zones
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_passwordcamera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
draw: ['all']
attributes:
- calibration_points camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
country: "de"
name: "My Vacuum Camera"
colors:
color_map_inside: [32, 115, 185]
color_map_outside: [19, 87, 148]
color_map_wall: [100, 196, 254]
color_map_wall_v2: [93, 109, 126]
color_grey_wall: [93, 109, 126]
color_path: [147, 194, 238]
color_goto_path: [0, 255, 0]
color_predicted_path: [255, 255, 0, 0]
color_zones: [0xAD, 0xD8, 0xFF, 0x8F]
color_zones_outline: [0xAD, 0xD8, 0xFF]
color_virtual_walls: [255, 0, 0]
color_no_go_zones: [255, 33, 55, 127]
color_no_go_zones_outline: [255, 0, 0]
color_no_mop_zones: [163, 130, 211, 127]
color_no_mop_zones_outline: [163, 130, 211]
color_charger: [0x66, 0xfe, 0xda, 0x7f]
color_robo: [75, 235, 149]
color_unknown: [0, 0, 0]
color_scan: [0xDF, 0xDF, 0xDF]
room_colors:
1: [240, 178, 122]
2: [133, 193, 233]
3: [217, 136, 128]
4: [52, 152, 219]
5: [205, 97, 85]
6: [243, 156, 18]
7: [88, 214, 141]
8: [245, 176, 65]
9: [252, 212, 81]
10: [72, 201, 176]
11: [84, 153, 199]
12: [133, 193, 233]
13: [245, 176, 65]
14: [82, 190, 128]
15: [72, 201, 176]
16: [165, 105, 18]
draw:
- charger
- path
- goto_path
- predicted_path
- no_go_zones
- no_mopping_zones
- vacuum_position
- virtual_walls
- zones
texts:
- text: "Room 1"
x: 25
y: 25
color: [125, 20, 213]
- text: "Room 2"
x: 25
y: 75
color: [125, 20, 213, 127]
font: "FreeSans.ttf"
font_size: 25
map_transformation:
scale: 2
rotate: 180
trim:
top: 10
bottom: 20
left: 30
right: 40
sizes:
charger_radius: 4
vacuum_radius: 6.5
attributes:
- calibration_points
- charger
- goto
- goto_path
- goto_predicted_path
- image
- is_empty
- map_name
- no_go_areas
- no_mopping_areas
- obstacles
- path
- room_numbers
- rooms
- vacuum_position
- vacuum_room
- walls
- zones
scan_interval:
seconds: 10
auto_update: trueThis integration was tested on following vacuums:
- Xiaomi Vacuum Gen 1 (Mi Robot Vacuum/SDJQR01RR/SDJQR02RR)
- Xiaomi Mi Robot 1S
- Roborock S4 (software with rooms support)
- Roborock S5 (software without rooms support)
- Roborock S5 (software with rooms support)
- Roborock S5 Max
- Roborock S6
- Roborock S6 MaxV
At this moment this integration is known to not work with following vacuums:
- Roborock E50
- Xiaomi Mi Robot Vacuum Mop Pro (STYJ02YM)
