Can't control the Go1 Edu with ROS #18
Comments
|
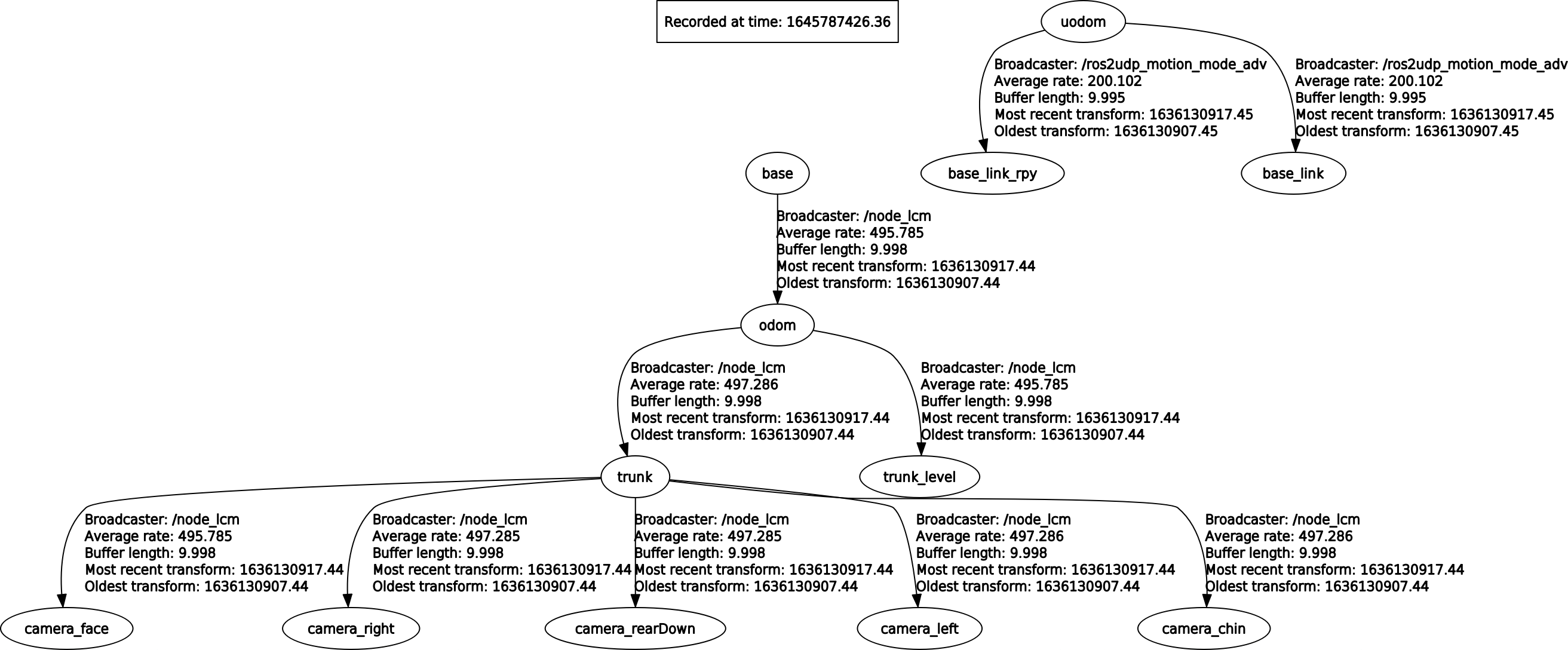
@Taucrates did you ever figure this out? I am trying to run simple slam. Issue is the TF tree is split into 2 as shown in your post. So I am confused, which base and odom frame should I be referring to for navigation. |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Hi,
We are trying to control the robot Unitree Go1 Edu using ROS. We've installed all packages and have a successful connection with the rosmaster executed on the Raspberry Pi of the robot. We can receive and send ROS messages from the robot to our PC and vice versa. The thing is that following all the steps described in different manuals and in the same github page of the packages we are not able to move the robot using ROS. We receive information of the sensors in ROS format, but anything related to the movement of the robot.
We have taken some screenshots of the rqt_graph and rqt_tf_tree as you can see below.
rqt_graph:
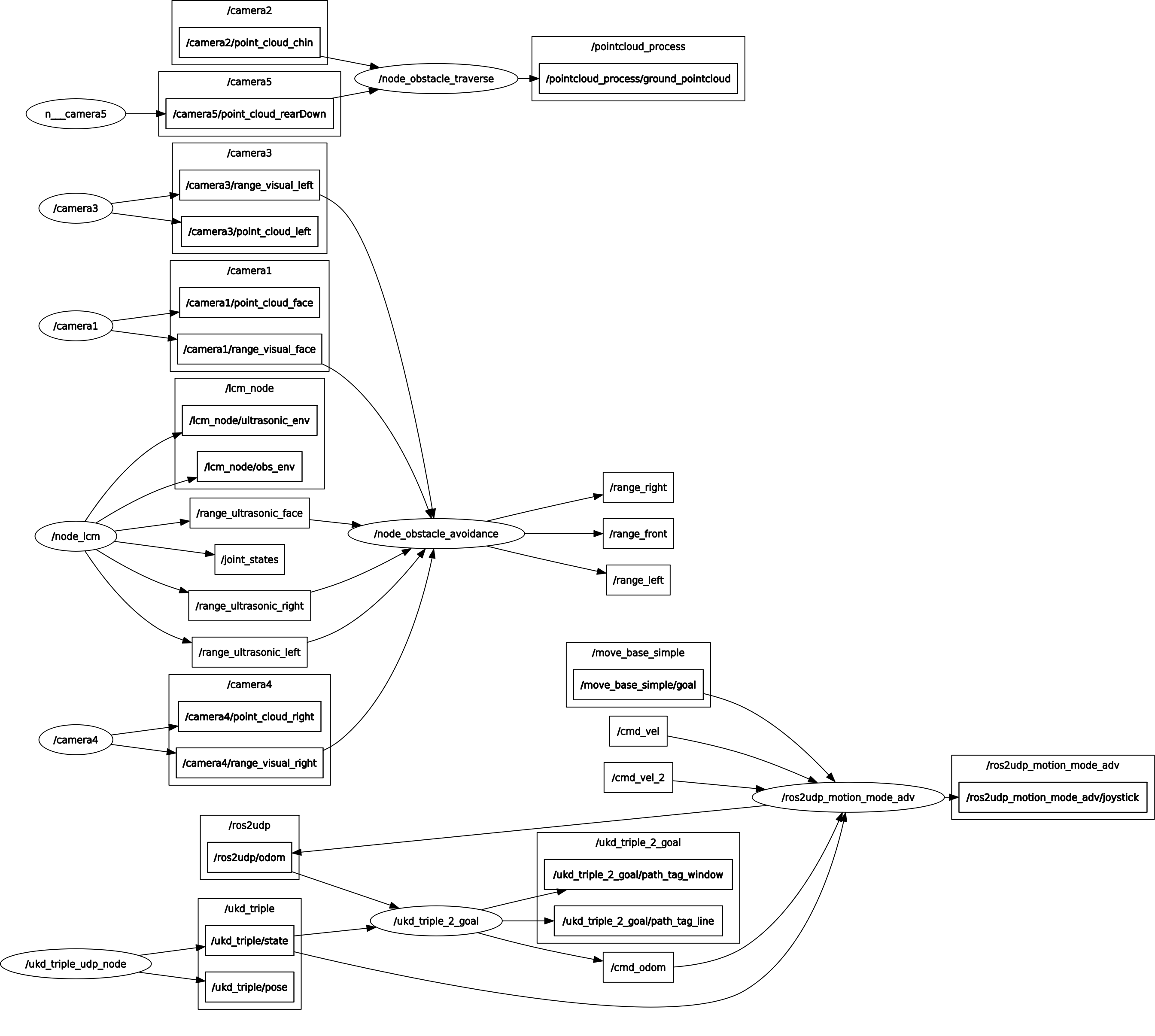
When we execute the walk_lcm node (following the steps described in the section "Run the package" of the unitree_ros_to_real package) it appears, obviously, in the rqt_graph without any connection to other nodes. And the robot still does any movement.
rqt_tf_tree:
Anybody knows nothing on which steps have to follow to control de Go1 Edu with ROS?
Thanks in advance.
The text was updated successfully, but these errors were encountered: