diff --git a/.spelling b/.spelling
index 69b82603..1fb658b6 100644
--- a/.spelling
+++ b/.spelling
@@ -26,6 +26,8 @@ square-ish
83x99x24mm
4mm
2.2A.
+uno
+3.3V
2mm
PyCharm
macOS
diff --git a/content/api/servo-board/GPIO.md b/content/api/servo-assembly/GPIO.md
similarity index 100%
rename from content/api/servo-board/GPIO.md
rename to content/api/servo-assembly/GPIO.md
diff --git a/content/api/servo-board/_index.md b/content/api/servo-assembly/_index.md
similarity index 100%
rename from content/api/servo-board/_index.md
rename to content/api/servo-assembly/_index.md
diff --git a/content/api/servo-board/servos.md b/content/api/servo-assembly/servos.md
similarity index 100%
rename from content/api/servo-board/servos.md
rename to content/api/servo-assembly/servos.md
diff --git a/content/api/servo-board/ultrasound.md b/content/api/servo-assembly/ultrasound.md
similarity index 56%
rename from content/api/servo-board/ultrasound.md
rename to content/api/servo-assembly/ultrasound.md
index 7c5cceba..b0fe866a 100644
--- a/content/api/servo-board/ultrasound.md
+++ b/content/api/servo-assembly/ultrasound.md
@@ -4,12 +4,6 @@ title: Ultrasound
We noticed many teams used ultrasound sensors to assist the vision system for finer distance measurement. So we've built in the mechanisms for reading and measuring distances using ultrasound right into the kit!
-Ultrasound sensors are connected to 2 pins, a _trigger_ pin, and an _echo_ pin. A signal is sent to the sensor on the _trigger_ pin, and the delay on a response on the _echo_ pin can be used to calculate the distance.
-
-{{% notice warning %}}
-Ultrasound should only be considered accurate up to around 2 metres, beyond that the signal can become distorted and produce erroneous results.
-{{% /notice %}}
-
## Reading a distance
Assuming you wired the _trigger_ pin to pin 6, and the _echo_ pin to pin 7, you can query the distance from the sensor using:
diff --git a/content/kit/_index.md b/content/kit/_index.md
index 297a3aa7..61f00c81 100644
--- a/content/kit/_index.md
+++ b/content/kit/_index.md
@@ -4,13 +4,15 @@ weight: 1
---
## Boards
+
Besides the Pi, there are 3 main controller boards to interface with your kit.
| [Motor Board](motor-board) | [Power Board](power-board) | [Servo Assembly](servo-assembly) |
|---|---|---|
-|  |  | Coming Soon! |
+|  |  |  |
## Kit Contents
+
With your kit, you should have the following boards:
| Part | Quantity |
@@ -20,9 +22,8 @@ With your kit, you should have the following boards:
| [Power Board](power-board) | 1 |
| [Servo Assembly](servo-assembly) (Arduino + Servo Hat) | 1 |
-
-
### Additional Parts
+
In addition to the boards, your kit will also contain:
| Part | Quantity | Specification | Notes |
diff --git a/content/kit/servo-assembly/GPIO.md b/content/kit/servo-assembly/GPIO.md
new file mode 100644
index 00000000..a34ad50d
--- /dev/null
+++ b/content/kit/servo-assembly/GPIO.md
@@ -0,0 +1,14 @@
+---
+title: GPIO
+---
+
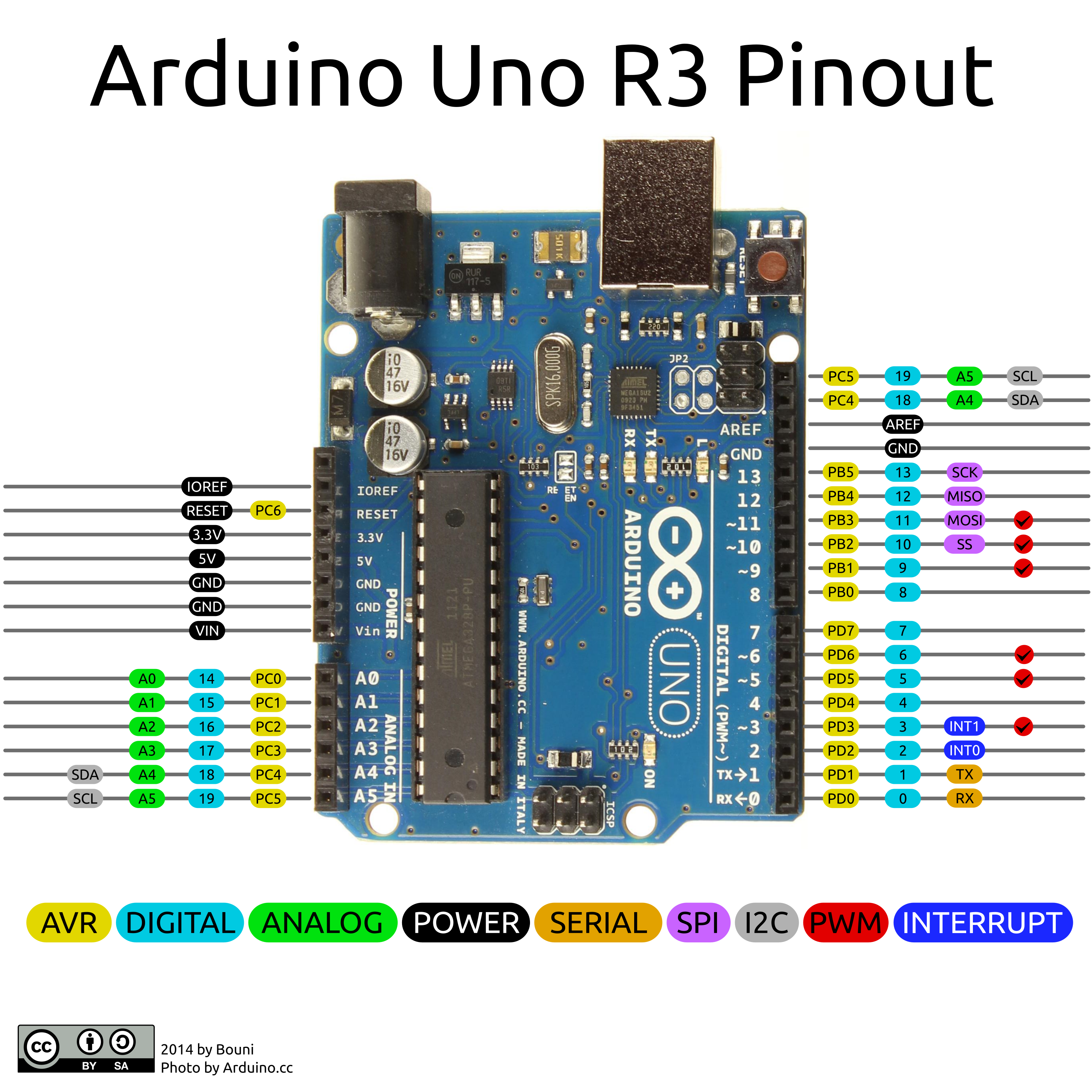
+The arduino allows you to connect your kit to your own electronics. It has 14 digital I/O pins, and 6 analogue. The analogue pins can read an analogue signal from 0 to 5V. The board also has a couple of ground pins, as well as some pins fixed at 3.3V and 5V output.
+
+The pin layout of the servo assembly is the same as an Arduino uno.
+
+
+
+
+{{% notice note %}}
+The servo hat communicates using 2 of the analogue input pins (4 and 5), and so these are reserved. Using these pins will cause the servo hat to behave weirdly.
+{{% /notice %}}
diff --git a/content/kit/servo-assembly/_index.md b/content/kit/servo-assembly/_index.md
index 592e8677..700cd481 100644
--- a/content/kit/servo-assembly/_index.md
+++ b/content/kit/servo-assembly/_index.md
@@ -1,3 +1,21 @@
---
title: Servo Assembly
---
+
+The servo assembly allows you to control GPIO pins, Analogue pins, and servos. It's comprised of [an arduino](https://store.arduino.cc/arduino-uno-rev3), and a [servo hat](https://learn.adafruit.com/16-channel-pwm-servo-driver/overview).
+
+
+
+## The servo hat
+The servo hat enables you to control up to 16 servos. It's attached to the top of the arduino, passing through its pins.
+
+## The reset button
+The reset button allows you to instantly reboot the arduino in case it isn't working. This is not a guaranteed fix, however may solve the problem.
+
+
+## Designs
+The board diagrams for both the Arduino and hat are below, as long as the custom firmware on the Arduino. You do not need this information to use the board but it may be of interest to some people.
+
+- [Servo Hat Schematic](https://cdn-learn.adafruit.com/assets/assets/000/036/269/original/adafruit_products_schem.png)
+- [Arduino Uno Schematic](https://www.arduino.cc/en/uploads/Main/Arduino_Uno_Rev3-schematic.pdf)
+- [Firmware Source](https://github.com/sourcebots/servo-firmware)
diff --git a/content/kit/servo-assembly/servos.md b/content/kit/servo-assembly/servos.md
index 6dbce4c6..c2874284 100644
--- a/content/kit/servo-assembly/servos.md
+++ b/content/kit/servo-assembly/servos.md
@@ -1,3 +1,11 @@
---
title: Servos
---
+
+By themselves, an Arduino is incapable of driving servos, without a lot of hard work and pin munging. So we're using a hat instead! This hat allows control of 16 servos.
+
+## Connecting your servos
+There are a total of 16 servo connectors, grouped into 4 groups of 4. Servo cables are connected with 0V (the black or brown wire) towards the side of the reset button.
+
+## Power
+The Arduino itself is powered entirely over USB. If you wish to use servos, you'll need to supply an additional 5V through the connector on the hat from the [power board](/kit/power-board). There are 2 red LEDs next to the power input, but these lights will turn on if the board is correctly powered.
diff --git a/content/kit/servo-assembly/ultrasound.md b/content/kit/servo-assembly/ultrasound.md
index d6244dae..57310338 100644
--- a/content/kit/servo-assembly/ultrasound.md
+++ b/content/kit/servo-assembly/ultrasound.md
@@ -1,3 +1,16 @@
---
title: Ultrasound
---
+
+Ultrasound sensors are a useful way of measuring distance when objects are too close for the [Webcam](/api/webcam) to detect, or if they don't have markers. Ultrasound sensors communicate primarily over 2 pins. A signal is sent to the sensor on the _trigger_ pin, and the delay on a response on the _echo_ pin can be used to calculate the distance.
+
+{{% notice warning %}}
+Ultrasound should only be considered accurate up to around 2 metres, beyond that the signal can become distorted and produce erroneous results.
+{{% /notice %}}
+
+## Wiring up the sensor
+The sensor has 4 pin connections: ground, 5V, _trigger_ and _echo_. Most ultrasound sensors will label which pin is which. The ground and 5V should be wired to the ground and 5V pins of the arduino respectively. The trigger and echo pins should be attached to 2 different digital IO pins. Take note of these 2 pins, you'll need them to [use the sensor](/api/servo-assembly/ultrasound).
+
+{{% notice tip %}}
+If the sensor always returns a distance of 0, it means the _trigger_ and _echo_ pins are connected the wrong way! Either change the pins in the code, or swap the connectors.
+{{% /notice %}}
\ No newline at end of file
diff --git a/static/img/kit/servo-assembly.jpg b/static/img/kit/servo-assembly.jpg
new file mode 100644
index 00000000..8dd47bc4
Binary files /dev/null and b/static/img/kit/servo-assembly.jpg differ