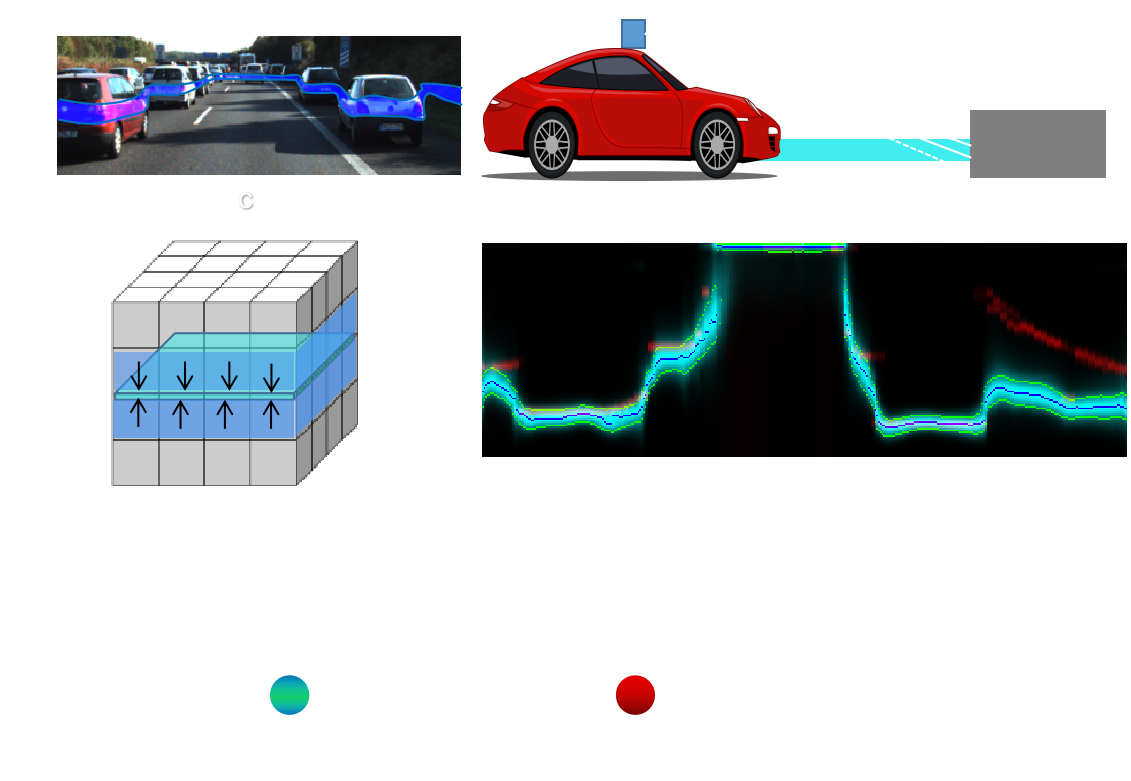
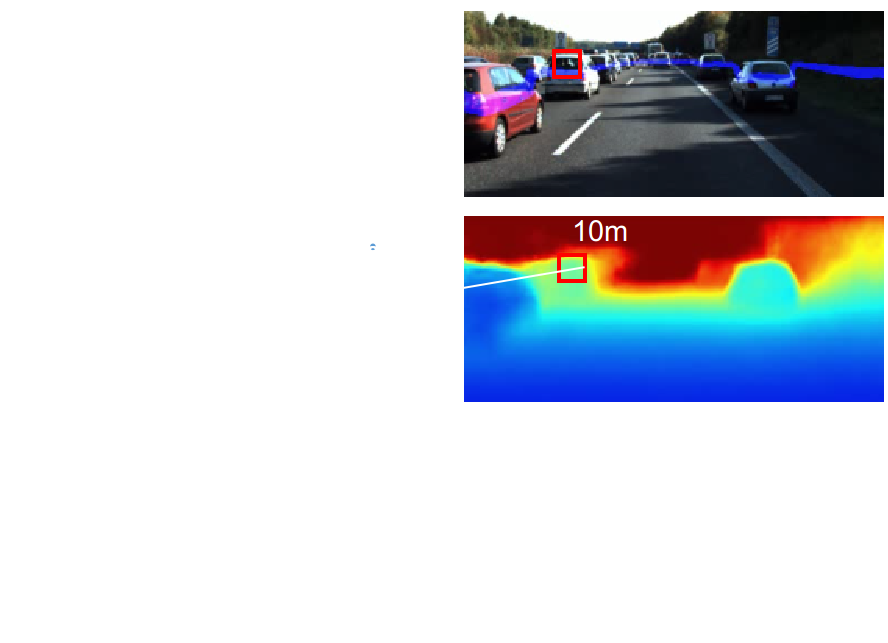
This code predicts depth from RGB images. But instead of producing depth alone, it produces a multimodal depth distribution for each pixel, in the form of a categorical distribution. This is useful for weeding out uncertain 3d points, or in downstream adaptive depth sensing tasks. We solve the task of Monocular, Stereo and Lidar Upsampling based depth estimation using the same architecture.
Monocular

Stereo

Upsampling

Stereo Cloud

Neural RGBD introduced the world to Depth Probability Fields (DPV). We build off that idea and produce an easy to understand and extend code. Instead of predicting depth per pixel, we predict a distribution per pixel. To help us visualize the uncertainty, we collapsed the distribution along the surface of the road so that you can visualize the Uncertainty Field (UF). You can read more details in here
 |
 |
- Download Kitti
# Download from http://www.cvlibs.net/datasets/kitti/raw_data.php
# Use the raw_kitti_downloader script
# Link kitti to a folder in this project folder
ln -s {absolute_kitti_path} kitti
- Install Python Deps
torch, matplotlib, numpy, cv2, pykitti, tensorboardX
- Compile external deps
cd external
# Select the correct sh file depending on your python version
# Modify it so that you select the correct libEGL version
# Eg. /usr/lib/x86_64-linux-gnu/libEGL.so.1.1.0
sudo sh compile_3.X.sh
# Ensure everything compiled correctly with no errors
- Download pre-trained models
# https://drive.google.com/file/d/1XN5lrFobInkcJ4F6cHgAd385eX9Galfw/view?usp=sharing
unzip output.zip
# Eval
- Moving Monocular Depth Estimation
python3 train.py --config configs/default_mono.json --eval --viz
- Moving Monocular Depth Estimation with Feedback
python3 train.py --config configs/default_mono_feedback.json --eval --viz
- Stereo Depth Estimation
python3 train.py --config configs/default_stereo.json --eval --viz
- Stereo Depth Estimation with Feedback
python3 train.py --config configs/default_stereo_feedback.json --eval --viz
- Moving Monocular Lidar Upsampling
python3 train.py --config configs/default_mono_upsample.json --eval --viz
# Training
Training only works with Python 3 as it uses distributed training
To train, simply remove the eval and viz flags. Use the `batch_size` flag to change batch size. It automatically splits it among the GPUs available
`pkill -f -multi` to clear memory if crashes
Coming soon. Disclaimer: This is a template code that I have written to extend some research I am working on. Please be sure to cite this if you use this code
Uses code from https://github.com/lliuz/ARFlow (ARFlow) and https://github.com/NVlabs/neuralrgbd (NeuralRGBD)