How does the num_radar_pts parameter is obtained? #1098
Comments
|
@HYY-ying there are multiple radars on the ego, so you might have to consolidate all the points for all the radars at a given keyframe and then use that consolidated radar point cloud for the counting |
|
Thank you for your answer! I have one more question, what is the relationship between radial velocity V_r and V_x(V_y)? |
|
And what's the definition of steering angle? Is it α or (π/2-α) in the image? |

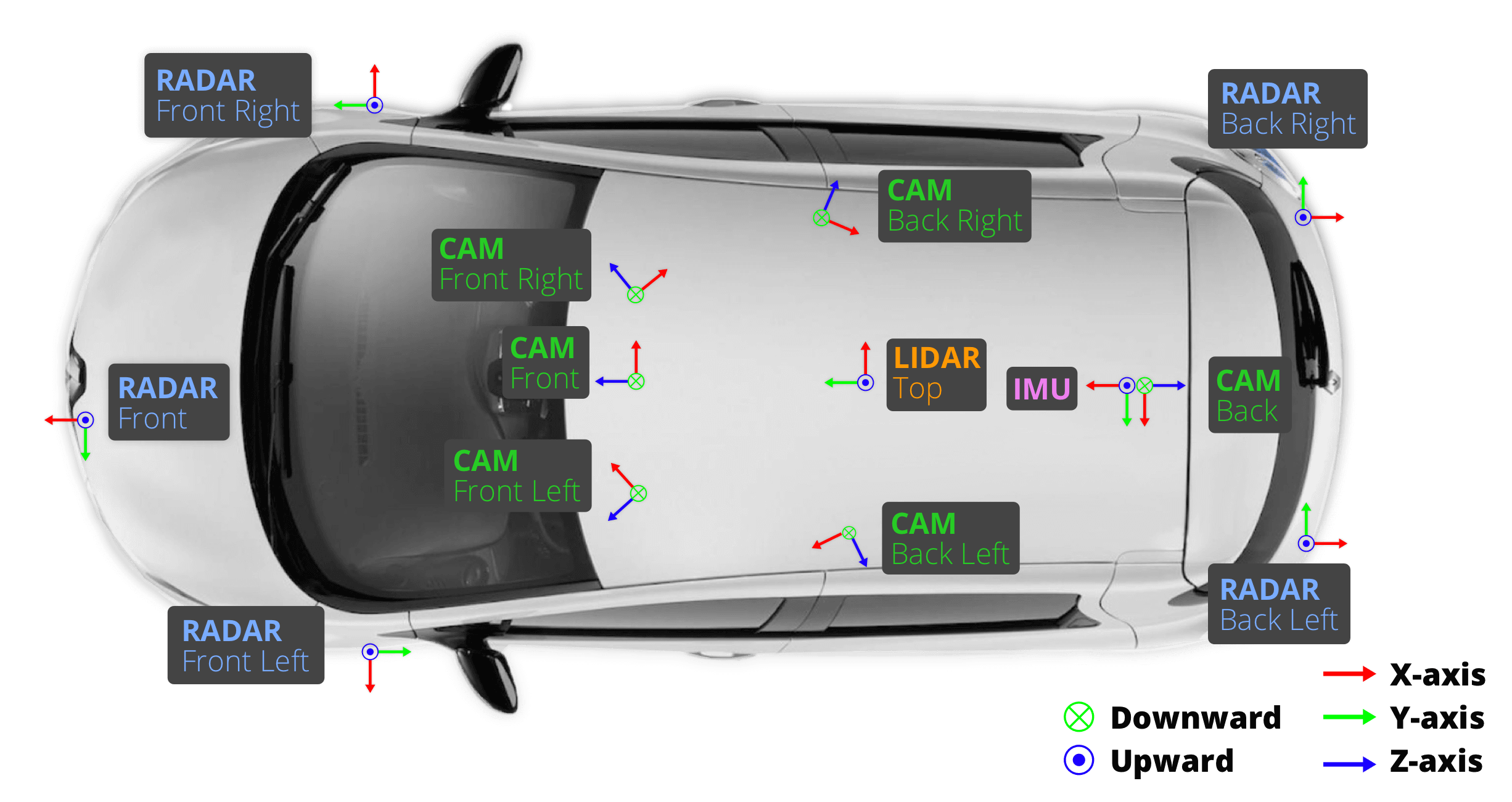
The steering angle of the agent depends on the coordinate frame you are taking reference from - pls see https://www.nuscenes.org/static/media/data.9ef46c59.png for the various coordinates frames |
|
yep, suppose this picture is in radar coordinate system, I'm trying to figure out if the steering angle is (π/2-α) in nuscenes? I think so, but I'm not sure. |

{kind=link}
Hello! I would like to ask how the num_radar_pts parameter is obtained? Is it to convert the lidar bounding box and radar point cloud data into the same coordinate system and then use the function points_in_box from nuscenes.utils.geometry_utils to count? And how many radar sweeps were used? The result I got by converting the lidar bounding box and radar pcd data into the global coordinate and counting pts using function points_in_box from nuscenes.utils.geometry_utils is different from the num_radar_pts given in the sample_annotation. I only used just a single radar sweep and didn't do any invalid point filtering.
The text was updated successfully, but these errors were encountered: