{kind=link}
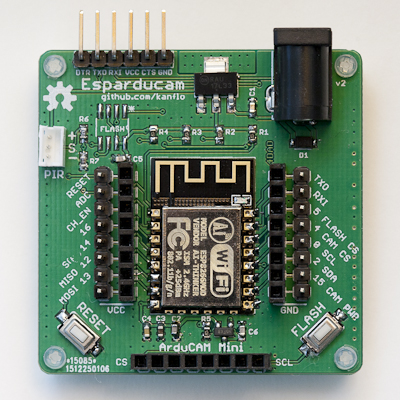
This repository contains code and schematics to build a development board joining the ESP8266 with the Arducam Mini module. Build surveillance cameras, read your water meter, attach one to your kite.
The board design allows for small breakout boards to be attached. There currently is a breakout board the the RFM69C, an ESP12 board with pogo pins and one for swappable ESP12 modules.
Oh, the accompanying blog posts are here, here and here.
Clone the ESP Open RTOS repository. See the documentation for how to add your SSID name and password.
git clone --recursive https://github.com/Superhouse/esp-open-rtos.git
Add nedded extra modules to ESP Open RTOS ("EOR"):
cd esp-open-rtos/extras
git clone https://github.com/kanflo/eor-spi.git spi
git clone https://github.com/kanflo/eor-http-upload.git http-upload
Someday I'll start using the native EOR SPI driver, you have to bear with me for now :)
Set the environment variable $EOR_ROOTto point to your EOR repository:
export EOR_ROOT=/path/to/esp-open-rtos
Clone this repository, make and flash:
git clone --recursive https://github.com/kanflo/esparducam.git
cd esparducam
make -j8 && make flash
The repository is preconfigured for the Esparducam board. Check config.h for building for the Esparducam Mini.
When flashing has completed, open a serial terminal to learn the IP number of your board. Open a web brower, point it to your IP and an image should be captured and displayed. While in the serial terminal, type help for a list of supported commands.
Start the python script server.py and type upload:<your IP> to capture, upload and display an image on your computer.
If you connect a PIR module [eBay] to the JST connector of the Esparducam board you can use the command motion:on:<your ip> to have the board capture and upload an image when motion is detected. The Mini variant has a 3 pin slot for attaching a PIR but you need to check the pinout carefully. It should be VCC, OUT, GND but I have seen other combinations.
This is work in progress and there is currently very little error handling. Simultaneous clients will break the camera demo.
Licensed under the MIT license. Have fun!