This repository is a V-REP simulation of the ClearPath Robotics Warthdog robot. This robot is an Unmanned Ground Vehicle (UGV) robot which is amphibious. It's a large all-terrain unmanned ground vehicle capable of traveling on land and in water. Both documentation and additionnal informations are available at ClearPath Robotics Warthdog.
Here is a tracker for each task we have to do.
| Task | Responsible | Progression |
|---|---|---|
| CAO | Jules | ✔️ |
| Dynamic Modelization | Quentin | ✔️ |
| Joint Configuration | Gwendal | ✔️ |
| Mesh Importing | Jacques | ✔️ |
| Lua/ROS interface | Paul-Antoine | ✔️ |
| Buoyancy | Quentin | ✔️ |
| Test on damaged terrain | Gwendal | ✔️ |
The CAO is available in the /docs/cao/. It was found on the official Warthog github repository. We assemble it on Autodesk Inventor the CAO in order to get the dimensions of the robot. Let's have a look at the CAO :
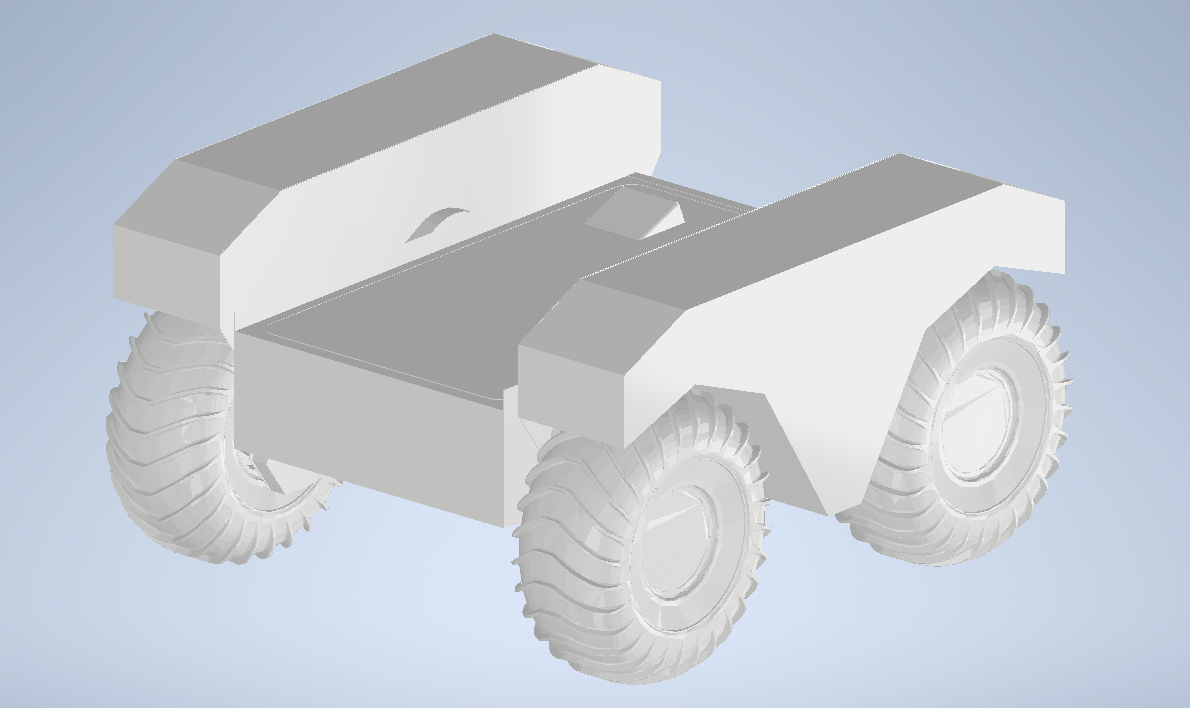
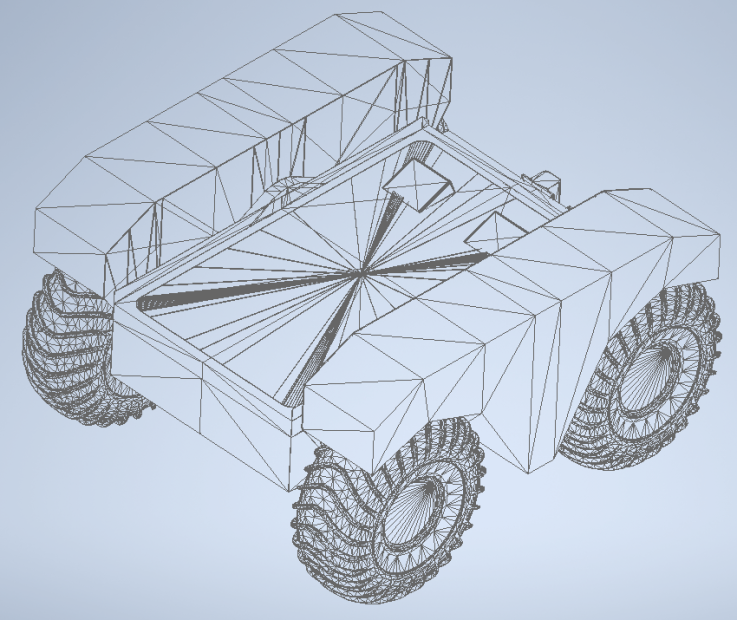
Here are the mesh object we will use in the mesh importing section :
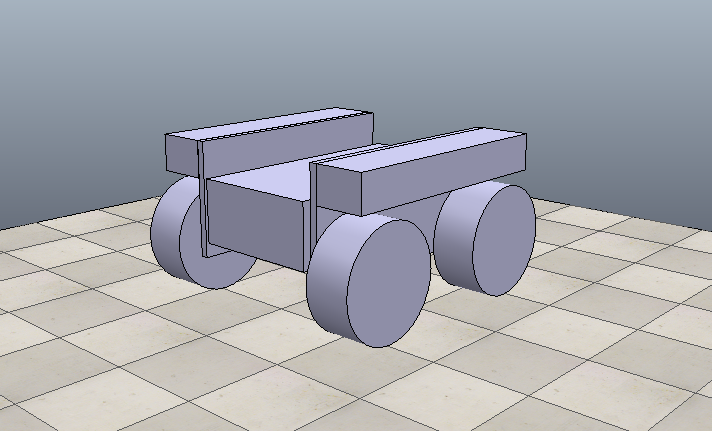
Because the processing of too complex shapes can be very difficult, we have to modelize the robot with box and cylinder in order to process dynamic and collision of the robot. Here is the final dynamic modelization :
We now have to configure joint on our robot. There is one revolute joint for each of the four wheel, and one revolute joint between each of the two buggy and the main chassis. So we have six revolute joint to configure. Then we need to motorized each wheel's joint and to let free the others. Finally, we added springs between the two buggys and the main chassis in order to bring the chassis back upright.
We created a scene which simulates the buoyancy of the warthog in the water.
[ ]
]
The WARTHOG is controlled in V-REP with ROS

Here are the video links :
https://www.youtube.com/watch?v=YT_t-u7yGwk
https://www.youtube.com/watch?v=WxgSTA-ixdk
Download CoppeliaSim Edu V4.0.0 rev4 : https://coppeliarobotics.com/downloads Put the directory warthog_ros, in your workspaceRos.
roscore
./vrep.sh warthog.ttt
rosrun warthog controller_node.py
rosrun key_teleop key_teleop.py key_vel:=cmd_velYou must run the simulation by clicking on the play button on the top-right of the window. You can now move the robot with your keyboard. And test the WARTHOG in the sea.
- Jules Berhault -
- Quentin Brateau - Teusner 😎
- Paul-Antoine Le Tolguennec -
- Gwendal Priser - gwendalp 🌊
This project is licensed under the GNU General Public License v3.0 - see the LICENSE.md file for details