- How OSRM Calculate Weight and Duration
This document will try to explain how does OSRM calculate weight and duration of a route. All the calculation of static weight and duration will be done in osrm-extract, which converts original map data (i.e. OSM) to an OSRM edge-expanded graph.
- Refer to Understanding OSRM Graph Representation for the Terminology OSRM edge-expanded graph.
- Refer to osrm-extract Startup and Process Call Graph to get a whole picture of
osrm-extract.
Below are some miscellaneous for this document:
- This document will focus on how to calculate weight and duration for a route for car, since generating route for car is one of the most important and most complex feature of OSRM. It means:
- Only
car.luawill be focused on, other profiles will be ignored. - Only default behavior of car related codes will be read, ignore other unrelated codes.
- Only
- Many of description will be represented by comments
--[Jay] ...inLuacode snippets or//[Jay] ...inC++code snippets.
| Name | Description |
|---|---|
speed |
Unit: km/h. This will result in the best estimated travel times. |
duration |
Estimated travel times. Unit: seconds. |
rate |
The rate is an abstract measure that you can assign to ways as you like to make some ways preferable to others. Routing will prefer ways with high rate. It represents weight per meter. The unit will be meters per second if the weight is time based. |
weight |
The weight of a way is normally computed as length / rate. The weight can be thought of as the resistance or cost when passing the way. Routing will prefer ways with low weight. You can also set the weight of a way to a fixed value. In this case it's not calculated based on the length or rate, and the rate is ignored. |
weight_name |
Name used in output for the routing weight property, i.e. indicating which weight was used. - weight_name=routability: For routing based on duration, but weighted for preferring certain roads. - weight_name=duration: For shortest duration without penalties for accessibility. - weight_name=distance: For shortest distance without penalties for accessibility. |
Refer to OSRM Profiles - Understanding speed, weight and rate for more explaination of these concepts.
It's a good idea to read OSRM Profiles first. It explains why need profiles and how does it work. Meanwhile, it also describes structure and elements details of profiles.
A profile describes whether or not it's possible to route along a particular type of way, whether we can pass a particular node, and how quickly we'll be traveling when we do.
A profile provided functions to process for OSM node/way/turn, refer to Interaction Between C++ and Lua In OSRM for what are these functions, what they actually do and where they're invoked.
Most of handles in the Lua function process_way() are dealing with whether a way routable. Also, some of them are related on speed/rate processing.
In below codes, the values of several OSM keys Key:highway, Key:route and Key:bridge have been retrieved first.
function process_way(profile, way, result, relations)
-- [Jay] retrieve values of `highway`,`bridge`,`route` for post way handlers
-- data table for storing intermediate values during processing
local data = {
-- prefetch tags
highway = way:get_value_by_key('highway'),
bridge = way:get_value_by_key('bridge'),
route = way:get_value_by_key('route')
}
handlers = Sequence {
-- [Jay] define way handlers
-- ...
}
-- [Jay] run way handlers sequentially
WayHandlers.run(profile, way, result, data, handlers, relations)
-- [Jay] others
endLet's look inside speed/rate related sub-functions of process_way() one-by-one.
There're two kinds of values will be got after these sub-functions:
forward_speed/backward_speed/forward_rate/backward_ratefor a normal and routable way;- or
weight/durationfor routable ferry/shuttle_train/movable bridge.
-
Referenced OSM keys/values:
- Key:route: route=ferry, route=shuttle_train
- For route=ferry and route=shuttle_train, there're pre-defined
route_speedincar.lua. All other values of Key:route will be ignored.
- For route=ferry and route=shuttle_train, there're pre-defined
- Key:duration
- If route=ferry or route=shuttle_train exists,
- firstly will try to get value of Key:duration as
durationdirectly, since it's highly recommended for indicating how long the route takes ('00:05' is 5 minutes, '1:15' an hour fifteen, or '48:00' two days). - otherwise use the pre-defined
route_speedto calculateweight/durationlater, similar with normal ways.
- firstly will try to get value of Key:duration as
- If route=ferry or route=shuttle_train exists,
- Key:route: route=ferry, route=shuttle_train
-
Codes
-- handling ferries and piers
function WayHandlers.ferries(profile,way,result,data)
local route = data.route
if route then
local route_speed = profile.route_speeds[route]
if route_speed and route_speed > 0 then
local duration = way:get_value_by_key("duration")
if duration and durationIsValid(duration) then
result.duration = math.max( parseDuration(duration), 1 )
end
result.forward_mode = mode.ferry
result.backward_mode = mode.ferry
result.forward_speed = route_speed
result.backward_speed = route_speed
end
end
end route_speeds = {
ferry = 5,
shuttle_train = 10
},-
Referenced OSM keys/values:
- Key:bridge: bridge:movable
- For bridge:movable, there're pre-defined
bridge_speedsincar.lua. All other values of Key:bridge will be ignored.
- For bridge:movable, there're pre-defined
- capacity:car
- Key:duration
- If bridge:movable exists and can be passed by car, i.e. capacity:car valid,
- firstly will try to get value of Key:duration as
durationdirectly, since it's highly recommended for indicating how long the route takes ('00:05' is 5 minutes, '1:15' an hour fifteen, or '48:00' two days). - otherwise use the pre-defined
bridge_speedsto calculateweight/durationlater, similar with normal ways.
- firstly will try to get value of Key:duration as
- If bridge:movable exists and can be passed by car, i.e. capacity:car valid,
- Key:bridge: bridge:movable
-
Codes
-- handling movable bridges
function WayHandlers.movables(profile,way,result,data)
local bridge = data.bridge
if bridge then
local bridge_speed = profile.bridge_speeds[bridge]
if bridge_speed and bridge_speed > 0 then
local capacity_car = way:get_value_by_key("capacity:car")
if capacity_car ~= 0 then
result.forward_mode = profile.default_mode
result.backward_mode = profile.default_mode
local duration = way:get_value_by_key("duration")
if duration and durationIsValid(duration) then
result.duration = math.max( parseDuration(duration), 1 )
else
result.forward_speed = bridge_speed
result.backward_speed = bridge_speed
end
end
end
end
end bridge_speeds = {
movable = 5
},- Referenced OSM keys/values:
- Key:highway
- If value of Key:highway exist in pre-defined
speeds, prefer to use it. - otherwise use
default_speedinstead if routable.
- If value of Key:highway exist in pre-defined
- Key:highway
- Codes
- WayHandlers.speed in way_handlers.lua
- Tags.get_constant_by_key_value in tags.lua
- Tags.get_forward_backward_by_set in tags.lua
- speed definition in car.lua
- access_tag_whitelist definition in car.lua
- access_tag_blacklist definition in car.lua
- default_speed definition in car.lua
- access_tags_hierarchy definition in car.lua
-- handle speed (excluding maxspeed)
function WayHandlers.speed(profile,way,result,data)
if result.forward_speed ~= -1 then
return -- abort if already set, eg. by a route
end
local key,value,speed = Tags.get_constant_by_key_value(way,profile.speeds)
if speed then
-- set speed by way type
result.forward_speed = speed
result.backward_speed = speed
else
-- Set the avg speed on ways that are marked accessible
if profile.access_tag_whitelist[data.forward_access] then
result.forward_speed = profile.default_speed
elseif data.forward_access and not profile.access_tag_blacklist[data.forward_access] then
result.forward_speed = profile.default_speed -- fallback to the avg speed if access tag is not blacklisted
elseif not data.forward_access and data.backward_access then
result.forward_mode = mode.inaccessible
end
if profile.access_tag_whitelist[data.backward_access] then
result.backward_speed = profile.default_speed
elseif data.backward_access and not profile.access_tag_blacklist[data.backward_access] then
result.backward_speed = profile.default_speed -- fallback to the avg speed if access tag is not blacklisted
elseif not data.backward_access and data.forward_access then
result.backward_mode = mode.inaccessible
end
end
if result.forward_speed == -1 and result.backward_speed == -1 and result.duration <= 0 then
return false
end
end -- [Jay] i.e. static speeds if no better choice
speeds = Sequence {
highway = {
motorway = 90,
motorway_link = 45,
trunk = 85,
trunk_link = 40,
primary = 65,
primary_link = 30,
secondary = 55,
secondary_link = 25,
tertiary = 40,
tertiary_link = 20,
unclassified = 25,
residential = 25,
living_street = 10,
service = 15
}
}, -- [Jay] default_speed for routable ways which value of Key:highway is not exist in speeds
default_speed = 10,- Referenced OSM keys/values:
- Key:surface, Key:tracktype, Key:smoothness
- Limit speeds by these values and pre-defined surface_speeds,tracktype_speeds,smoothness_speeds.
- Key:surface, Key:tracktype, Key:smoothness
- Codes
-- reduce speed on bad surfaces
function WayHandlers.surface(profile,way,result,data)
local surface = way:get_value_by_key("surface")
local tracktype = way:get_value_by_key("tracktype")
local smoothness = way:get_value_by_key("smoothness")
if surface and profile.surface_speeds[surface] then
result.forward_speed = math.min(profile.surface_speeds[surface], result.forward_speed)
result.backward_speed = math.min(profile.surface_speeds[surface], result.backward_speed)
end
if tracktype and profile.tracktype_speeds[tracktype] then
result.forward_speed = math.min(profile.tracktype_speeds[tracktype], result.forward_speed)
result.backward_speed = math.min(profile.tracktype_speeds[tracktype], result.backward_speed)
end
if smoothness and profile.smoothness_speeds[smoothness] then
result.forward_speed = math.min(profile.smoothness_speeds[smoothness], result.forward_speed)
result.backward_speed = math.min(profile.smoothness_speeds[smoothness], result.backward_speed)
end
end- Referenced OSM keys/values:
- Key:maxspeed:advisory, Key:maxspeed
- Prefer to use 80% of max speed.
- Key:maxspeed:advisory, Key:maxspeed
- Codes
-- maxspeed and advisory maxspeed
function WayHandlers.maxspeed(profile,way,result,data)
local keys = Sequence { 'maxspeed:advisory', 'maxspeed' }
local forward, backward = Tags.get_forward_backward_by_set(way,data,keys)
forward = WayHandlers.parse_maxspeed(forward,profile)
backward = WayHandlers.parse_maxspeed(backward,profile)
if forward and forward > 0 then
result.forward_speed = forward * profile.speed_reduction
end
if backward and backward > 0 then
result.backward_speed = backward * profile.speed_reduction
end
end -- [Jay] reduce maxspeed factor
speed_reduction = 0.8,-
Referenced OSM keys/values:
- Key:service: Tag:service=alley, Tag:service=parking_aisle, Tag:service=driveway, Tag:service=drive-through
- Key:width, Key:lanes, Tag:oneway=alternating, Key:side_road
scale speeds to get better average driving times if these tags exist.
-
Codes
-- scale speeds to get better average driving times
function WayHandlers.penalties(profile,way,result,data)
-- heavily penalize a way tagged with all HOV lanes
-- in order to only route over them if there is no other option
local service_penalty = 1.0
local service = way:get_value_by_key("service")
if service and profile.service_penalties[service] then
service_penalty = profile.service_penalties[service]
end
local width_penalty = 1.0
local width = math.huge
local lanes = math.huge
local width_string = way:get_value_by_key("width")
if width_string and tonumber(width_string:match("%d*")) then
width = tonumber(width_string:match("%d*"))
end
local lanes_string = way:get_value_by_key("lanes")
if lanes_string and tonumber(lanes_string:match("%d*")) then
lanes = tonumber(lanes_string:match("%d*"))
end
local is_bidirectional = result.forward_mode ~= mode.inaccessible and
result.backward_mode ~= mode.inaccessible
if width <= 3 or (lanes <= 1 and is_bidirectional) then
width_penalty = 0.5
end
-- Handle high frequency reversible oneways (think traffic signal controlled, changing direction every 15 minutes).
-- Scaling speed to take average waiting time into account plus some more for start / stop.
local alternating_penalty = 1.0
if data.oneway == "alternating" then
alternating_penalty = 0.4
end
local sideroad_penalty = 1.0
data.sideroad = way:get_value_by_key("side_road")
if "yes" == data.sideroad or "rotary" == data.sideroad then
sideroad_penalty = profile.side_road_multiplier
end
local forward_penalty = math.min(service_penalty, width_penalty, alternating_penalty, sideroad_penalty)
local backward_penalty = math.min(service_penalty, width_penalty, alternating_penalty, sideroad_penalty)
if profile.properties.weight_name == 'routability' then
if result.forward_speed > 0 then
result.forward_rate = (result.forward_speed * forward_penalty) / 3.6
end
if result.backward_speed > 0 then
result.backward_rate = (result.backward_speed * backward_penalty) / 3.6
end
if result.duration > 0 then
result.weight = result.duration / forward_penalty
end
end
end service_penalties = {
alley = 0.5,
parking = 0.5,
parking_aisle = 0.5,
driveway = 0.5,
["drive-through"] = 0.5,
["drive-thru"] = 0.5
},Once Lua function process_way() finished, the C++ code ExtractorCallbacks::ProcessWay() will be called to handle this way in memory.
The terminology NodeBasedEdge can refer to Understanding OSRM Graph Representation - Terminology.
For weight/duration related handle, there will be 3 steps:
- construct
WeightData/DurationData
TheWeightData/DurationDatawill be represented bydetail::ByEdgeOrByMeterValue. It's a tricky way to store a single value but with different labels.
void ExtractorCallbacks::ProcessWay(const osmium::Way &input_way, const ExtractionWay &parsed_way)
{
//[Jay] ignored unrelated codes ...
//[Jay] both DurationData and WeightData are alias of detail::ByEdgeOrByMeterValue
InternalExtractorEdge::DurationData forward_duration_data;
InternalExtractorEdge::DurationData backward_duration_data;
InternalExtractorEdge::WeightData forward_weight_data;
InternalExtractorEdge::WeightData backward_weight_data;
//[Jay] construct WeightData/DurationData
//[Jay] 1. the `by_way` means `weight/duration` available for this way(i.e. ferry/shuttle_train/movable bridge),
//[Jay] so store the value for each nodes pair.
//[Jay] 2. the `by_meter` means `forward_speed/backward_speed/forward_rate/backward_rate` available for this way,
//[Jay] so store the value with unit meter per second.
const auto toValueByEdgeOrByMeter = [&nodes](const double by_way, const double by_meter) {
using Value = detail::ByEdgeOrByMeterValue;
// get value by weight per edge
if (by_way >= 0)
{
// FIXME We divide by the number of edges here, but should rather consider
// the length of each segment. We would either have to compute the length
// of the whole way here (we can't: no node coordinates) or push that back
// to the container and keep a reference to the way.
const std::size_t num_edges = (nodes.size() - 1);
return Value(Value::by_edge, by_way / num_edges);
}
else
{
// get value by deriving weight from speed per edge
return Value(Value::by_meter, by_meter);
}
};
if (parsed_way.forward_travel_mode != extractor::TRAVEL_MODE_INACCESSIBLE)
{
//[Jay] ignored unimportant codes here...
forward_duration_data = toValueByEdgeOrByMeter(parsed_way.duration, parsed_way.forward_speed / 3.6);
forward_weight_data = toValueByEdgeOrByMeter(parsed_way.weight, parsed_way.forward_rate);
}
if (parsed_way.backward_travel_mode != extractor::TRAVEL_MODE_INACCESSIBLE)
{
//[Jay] ignored unimportant codes here...
backward_duration_data = toValueByEdgeOrByMeter(parsed_way.duration, parsed_way.backward_speed / 3.6);
backward_weight_data = toValueByEdgeOrByMeter(parsed_way.weight, parsed_way.backward_rate);
}
//[Jay] ignored unrelated codes ... void ExtractorCallbacks::ProcessWay(const osmium::Way &input_way, const ExtractionWay &parsed_way)
{
//[Jay] ignored unrelated codes ...
if (in_forward_direction) //[Jay] forward edge
{
//[Jay] ignored unrelated codes ...
util::for_each_pair(
nodes.cbegin(),
nodes.cend(),
[&](const osmium::NodeRef &first_node, const osmium::NodeRef &last_node) {
NodeBasedEdgeWithOSM edge = {
OSMNodeID{static_cast<std::uint64_t>(first_node.ref())},
OSMNodeID{static_cast<std::uint64_t>(last_node.ref())},
0, // weight
0, // duration
{}, // geometry id
static_cast<AnnotationID>(annotation_data_id),
{true,
in_backward_direction && !split_edge,
split_edge,
parsed_way.roundabout,
parsed_way.circular,
parsed_way.is_startpoint,
parsed_way.forward_restricted,
road_classification,
parsed_way.highway_turn_classification,
parsed_way.access_turn_classification}};
//[Jay] store WeightData/DurationData with NodeBasedEdge in memory
external_memory.all_edges_list.push_back(InternalExtractorEdge(
std::move(edge), forward_weight_data, forward_duration_data, {}));
});
}
if (in_backward_direction && (!in_forward_direction || split_edge)) //[Jay] backward edge if necessary
{
//[Jay] similar as forward, no need to copy code snip again.
}
//[Jay] ignored unrelated codes ... NOTE: be aware that the unit of weight/duration will be 100ms start from here.
{
// Compute edge weights
//[Jay] ignored unrelated codes ...
//[Jay] weight/duration = distance / meter_per_second
const auto distance =
util::coordinate_calculation::greatCircleDistance(source_coord, target_coord);
const auto weight = edge_iterator->weight_data(distance);
const auto duration = edge_iterator->duration_data(distance);
//[Jay] `process_segment()` is not currently used in the car profile.
ExtractionSegment segment(source_coord, target_coord, distance, weight, duration);
scripting_environment.ProcessSegment(segment);
//[Jay] HIGHLIGHT: scale the weight/duration value by multiply 10, because it will use 100ms as unit for them.
auto &edge = edge_iterator->result;
edge.weight = std::max<EdgeWeight>(1, std::round(segment.weight * weight_multiplier));
edge.duration = std::max<EdgeWeight>(1, std::round(segment.duration * 10.));
//[Jay] ignored unrelated codes ...
}There're two actions for handle weight/duration applied during Compress NodeBasedGraph.
For what compress NodeBasedGraph do, please refer to Understanding OSRM Graph Representation - Basic Changes of Convert OSM to OSRM Edge-expanded Graph.
By current implementation, there'll be 2s(defined by traffic_light_penalty = 2 in car.lua) penalty added to both weight and duration on each compressible traffic_signals.


- graph_compressor.cpp#L218
Please be aware that comments in graph_compressor.cpp#L209 is not correct. it will be fixed by PR-5384.
//[Jay] ignored unrelated codes ...
const bool has_node_penalty = traffic_signals.find(node_v) != traffic_signals.end();
EdgeDuration node_duration_penalty = MAXIMAL_EDGE_DURATION;
EdgeWeight node_weight_penalty = INVALID_EDGE_WEIGHT;
if (has_node_penalty) //[Jay] if traffic_signals appeared, add some penalty for it
{
// we cannot handle this as node penalty, if it depends on turn direction
if (fwd_edge_data1.flags.restricted != fwd_edge_data2.flags.restricted)
continue;
// generate an artifical turn for the turn penalty generation
std::vector<ExtractionTurnLeg> roads_on_the_right;
std::vector<ExtractionTurnLeg> roads_on_the_left;
ExtractionTurn extraction_turn(0,
2,
false,
true,
false,
false,
TRAVEL_MODE_DRIVING,
false,
false,
1,
0,
0,
0,
0,
false,
TRAVEL_MODE_DRIVING,
false,
false,
1,
0,
0,
0,
0,
roads_on_the_right,
roads_on_the_left);
//[Jay] call Lua function `process_turn()` to add penalty.
//[Jay] But actually only the `traffic_signals` related codes in `process_turn()` will be touched,
//[Jay] since no other parameters pass in.
scripting_environment.ProcessTurn(extraction_turn);
//[Jay] HIGHLIGHT: same as before, scale the weight/duration value by multiply 10, because it will use 100ms as unit for them.
node_duration_penalty = extraction_turn.duration * 10;
node_weight_penalty = extraction_turn.weight * weight_multiplier;
}
//[Jay] ignored unrelated codes ...
function process_turn(profile, turn)
-- [Jay] ignored unrelated codes ...
if turn.has_traffic_light then
turn.duration = profile.properties.traffic_light_penalty
end
-- [Jay] ignored unrelated codes ...
-- for distance based routing we don't want to have penalties based on turn angle
if profile.properties.weight_name == 'distance' then
turn.weight = 0
else
turn.weight = turn.duration
end
-- [Jay] ignored unrelated codes ...
end traffic_light_penalty = 2, //[Jay] ignored unrelated codes ...
// add weight of e2's to e1
graph.GetEdgeData(forward_e1).weight += forward_weight2;
graph.GetEdgeData(reverse_e1).weight += reverse_weight2;
// add duration of e2's to e1
graph.GetEdgeData(forward_e1).duration += forward_duration2;
graph.GetEdgeData(reverse_e1).duration += reverse_duration2;
if (node_weight_penalty != INVALID_EDGE_WEIGHT &&
node_duration_penalty != MAXIMAL_EDGE_DURATION)
{
//[Jay] add weight/duration penalty caused by traffic_signals
graph.GetEdgeData(forward_e1).weight += node_weight_penalty;
graph.GetEdgeData(reverse_e1).weight += node_weight_penalty;
graph.GetEdgeData(forward_e1).duration += node_duration_penalty;
graph.GetEdgeData(reverse_e1).duration += node_duration_penalty;
}
//[Jay] ignored unrelated codes ... The terminology GraphEdge can refer to Understanding OSRM Graph Representation - Terminology.
Turn related weight/duration penalties will be calculated while each GraphEdge generating.
//[Jay] ignored unrelated codes ...
// compute weight and duration penalties
const auto is_traffic_light = m_traffic_lights.count(intersection_node);
const auto is_uturn =
guidance::getTurnDirection(turn_angle) == guidance::DirectionModifier::UTurn;
//[Jay] fill in parameters for Lua function `process_turn()`
//[Jay] Actually most of these parameters have not been used in `process_turn()`.
ExtractionTurn extracted_turn(
// general info
turn_angle,
road_legs_on_the_right.size() + road_legs_on_the_left.size() + 2 - is_uturn, //[Jay] `turn.number_of_roads` in `process_turn()`
is_uturn,
is_traffic_light,
m_edge_based_node_container.GetAnnotation(edge_data1.annotation_data)
.is_left_hand_driving,
// source info
edge_data1.flags.restricted,
m_edge_based_node_container.GetAnnotation(edge_data1.annotation_data).travel_mode, //[Jay] `turn.source_mode` in `process_turn()`
edge_data1.flags.road_classification.IsMotorwayClass(),
edge_data1.flags.road_classification.IsLinkClass(),
edge_data1.flags.road_classification.GetNumberOfLanes(),
edge_data1.flags.highway_turn_classification,
edge_data1.flags.access_turn_classification,
((double)intersection::findEdgeLength(edge_geometries, node_based_edge_from) /
edge_data1.duration) *
36,
edge_data1.flags.road_classification.GetPriority(),
// target info
edge_data2.flags.restricted,
m_edge_based_node_container.GetAnnotation(edge_data2.annotation_data).travel_mode, //[Jay] `turn.target_node` in `process_turn()`
edge_data2.flags.road_classification.IsMotorwayClass(),
edge_data2.flags.road_classification.IsLinkClass(),
edge_data2.flags.road_classification.GetNumberOfLanes(),
edge_data2.flags.highway_turn_classification,
edge_data2.flags.access_turn_classification,
((double)intersection::findEdgeLength(edge_geometries, node_based_edge_to) /
edge_data2.duration) *
36,
edge_data2.flags.road_classification.GetPriority(),
// connected roads
road_legs_on_the_right,
road_legs_on_the_left);
//[Jay] call Lua function `process_turn()` for turn weight/duration penalties
scripting_environment.ProcessTurn(extracted_turn);
//[Jay] HIGHLIGHT: same as before, scale the weight/duration value by multiply 10, because it will use 100ms as unit for them.
// turn penalties are limited to [-2^15, 2^15) which roughly translates to 54 minutes
// and fits signed 16bit deci-seconds
auto weight_penalty =
boost::numeric_cast<TurnPenalty>(extracted_turn.weight * weight_multiplier);
auto duration_penalty = boost::numeric_cast<TurnPenalty>(extracted_turn.duration * 10.);
BOOST_ASSERT(SPECIAL_NODEID != nbe_to_ebn_mapping[node_based_edge_from]);
BOOST_ASSERT(SPECIAL_NODEID != nbe_to_ebn_mapping[node_based_edge_to]);
//[Jay] weight/duration of GraphEdge = weight/duration of NodeBasedEdge + turn_penalty
auto weight = boost::numeric_cast<EdgeWeight>(edge_data1.weight + weight_penalty);
auto duration = boost::numeric_cast<EdgeWeight>(edge_data1.duration + duration_penalty);
//[Jay] ignored unrelated codes ...
-
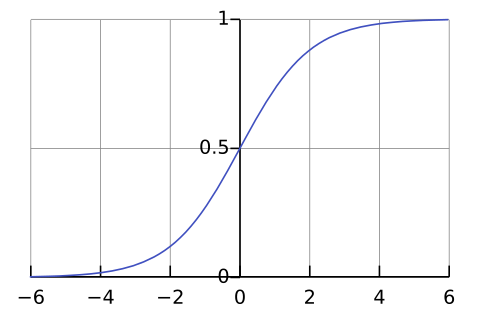
sigmoid function
A sigmoid function is a mathematical function having a characteristic "S"-shaped curve or sigmoid curve. Often, sigmoid function refers to the special case of the logistic function shown in below figure and defined by the formula:
-
process_turn()in car.lua
Calculate turnweight/durationpenalities byLuafunctionprocess_turn().

{kind=link}
function process_turn(profile, turn)
-- Use a sigmoid function to return a penalty that maxes out at turn_penalty
-- over the space of 0-180 degrees. Values here were chosen by fitting
-- the function to some turn penalty samples from real driving.
local turn_penalty = profile.turn_penalty
local turn_bias = turn.is_left_hand_driving and 1. / profile.turn_bias or profile.turn_bias
if turn.has_traffic_light then
-- [Jay] default 2s for `traffic_signals` on each turn
turn.duration = profile.properties.traffic_light_penalty
end
if turn.number_of_roads > 2 or turn.source_mode ~= turn.target_mode or turn.is_u_turn then
if turn.angle >= 0 then
-- [Jay] Let's say `sig_value` is the return value of the sigmoid function,
-- [Jay] i.e. `sig_value = 1 / (1 + math.exp( -((13 / turn_bias) * turn.angle/180 - 6.5*turn_bias)))`,
-- [Jay] `sig_value` will in range (0,1),
-- [Jay] so the formula is equal to `turn.duration = turn.duration + turn_penalty * sig_value`,
-- [Jay] and the `turn_penalty * sig_value` will in range (0,7.5),
-- [Jay] which means extra (0,7.5) seconds penalty will be applied by turn.
turn.duration = turn.duration + turn_penalty / (1 + math.exp( -((13 / turn_bias) * turn.angle/180 - 6.5*turn_bias)))
else
turn.duration = turn.duration + turn_penalty / (1 + math.exp( -((13 * turn_bias) * -turn.angle/180 - 6.5/turn_bias)))
end
if turn.is_u_turn then
-- [Jay] default 20s for `u_turn` on each turn
turn.duration = turn.duration + profile.properties.u_turn_penalty
end
end
-- for distance based routing we don't want to have penalties based on turn angle
if profile.properties.weight_name == 'distance' then
turn.weight = 0
else
turn.weight = turn.duration
end
if profile.properties.weight_name == 'routability' then
-- penalize turns from non-local access only segments onto local access only tags
if not turn.source_restricted and turn.target_restricted then
turn.weight = constants.max_turn_weight
end
end
end
u_turn_penalty = 20,
traffic_light_penalty = 2,
turn_penalty = 7.5,
turn_bias = 1.075,read more about the turn_penalty calculation by sigmoid function: