[ROS2] [Turtlebot3] Wrong Visualization in RViz and Nav2 doesn't work #447
Comments
|
Please don't cross post tickets, closing |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Required Info:
Steps to reproduce issue
Expected behavior
Getting a live map feed as well as odometry and tf data in RViz2 as described in the README and the Wiki.

Actual behavior
When entering:
I receive this all the time
And the RViz looks like this:
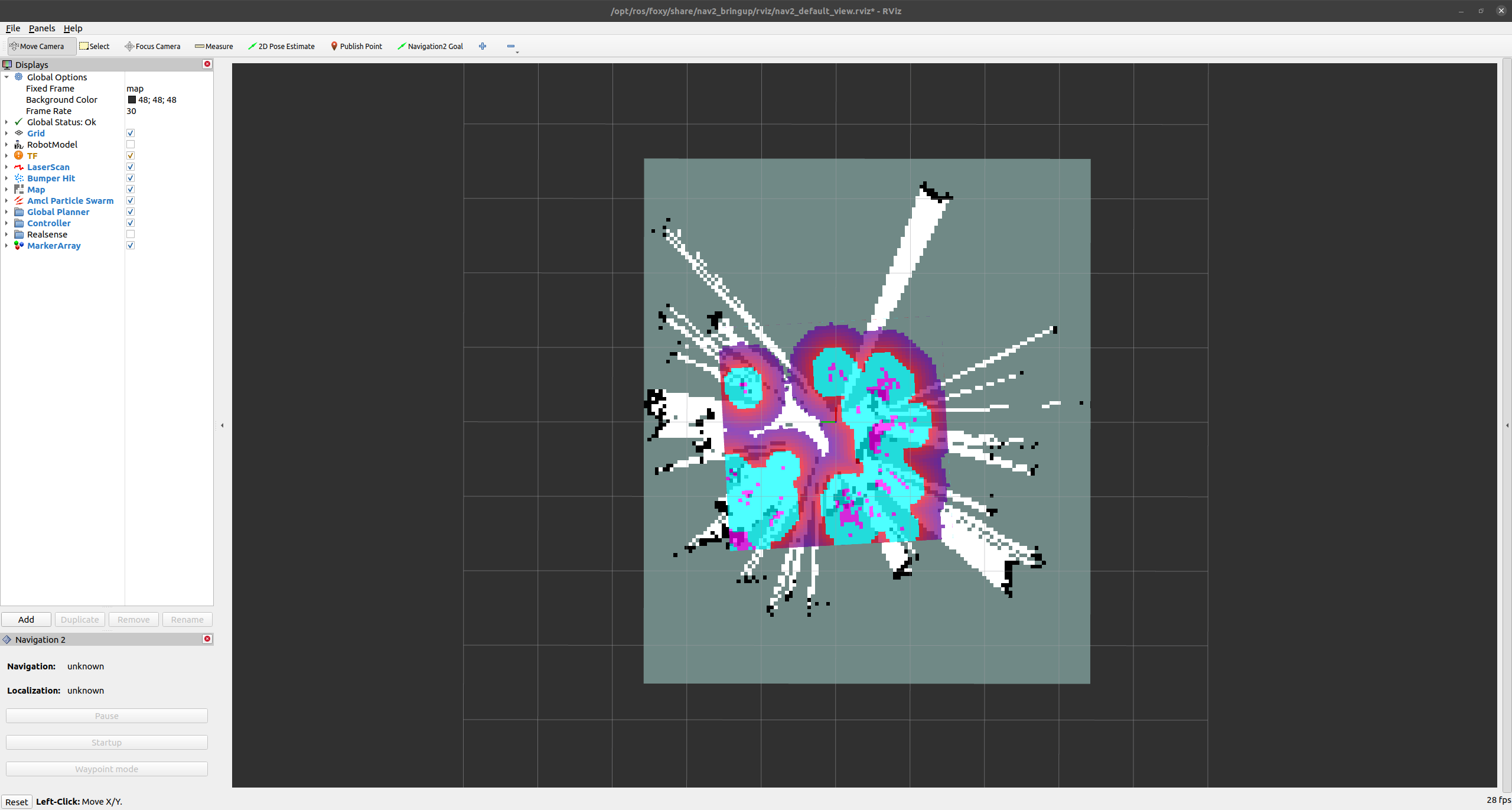
Although the map updates, the visualization is wrong and Nav2 doesn't seem to work (see RViz pic below left)
Additional information
When entering:
I receive this messages all the time:

And when entering:
I hope you can help me, thanks in advance :)
ros-navigation/navigation2#2651
The text was updated successfully, but these errors were encountered: