BatchSD not publishing to Google Sheets #170
Comments
|
Hi Bryson, Have you tested this using Batch Transmit and not pushing dirty integrated sensor data into the Node transmit packet? Have you tested uploading code to Google sheets using a dirty integrated sensor on the Hub side? e.g. no nodes. Just a hub taking Loom integrated and non-loom integrated data into a packet and uploading to Google sheets? Please test these and respond with behavior. |
|
We can't forget this is still something that needs fixing. |
|
Does the hub log received batch data to SD at least? Or is SD logging having an issue there as well? |
Describe the bug
BatchSD does not publish with Dendrometer code with both LTE and Ethernet usage. Dendrometer uses dirty integrated sensor values added to the json using the add_data() function. Through testing, it's found that whether or not the dirty integrated sensor values are added (whether add_data() is left in or commented out), the data will not publish through Batch. Dendrometer uses LoRa batch_send() to send data to a hub that either has an Ethernet module or an LTE board.
Hardware in Use
Dendrometer node
Hub
To Reproduce
Steps to reproduce the behavior:
Expected behavior
Data should successfully upload to Google Sheets
Code
Node:
#include <Loom.h> #include "AS5311.h" // Include configuration const char* json_config = #include "config.h" ; // In Tools menu, set: // Internet > Disabled // Sensors > Enabled // Radios > Enabled // Actuators > Enabled // Max > Disabled using namespace Loom; Loom::Manager Feather{}; //Pins #define CS 9 // A3 #define CLK A5 #define DO A4 #define LED A2 #define DELAY_IN_SECONDS 5 #define DELAY_IN_MINUTES 0 #define INT_BUT 11 // A1 #define RTC_INT_PIN 12 #define HYPNOS3 5 //#define HYPNOS5 6 //Global Variables volatile bool flag = false; // Interrupt flag volatile bool button = false; // Check to see if button was pressed uint32_t start = 0; uint32_t prevTwoSig = 0; float elapsed = 0; float prev = 0; float prevMicro = 0; const int max_packets = 5; // Number of packets collected before sending through LoRa int counter = 0; void setup() { // Enable waiting for RTC interrupt, MUST use a pullup since signal is active low pinMode(RTC_INT_PIN, INPUT_PULLUP); pinMode(INT_BUT, INPUT_PULLUP); pinMode(HYPNOS3, OUTPUT); // Enable control of 3.3V rail //pinMode(HYPNOS5, OUTPUT); // Enable control of 5V rail pinMode(13, OUTPUT); // Initialize Hypnos digitalWrite(HYPNOS3, LOW); // Enable 3.3V rail //digitalWrite(HYPNOS5, HIGH); // Enable 5V rail digitalWrite(13, HIGH); Feather.begin_serial(true); Feather.parse_config(json_config); Feather.print_config(); // Begin Communication with AS5311 init_AS(); // LED pin set pinMode(LED, OUTPUT); // Make sure the magnet is positioned correctly //verify_position(); // Flash three times for verification green_flash(); getInterruptManager(Feather).register_ISR(RTC_INT_PIN, ISR_pin12, LOW, ISR_Type::IMMEDIATE); getInterruptManager(Feather).register_ISR(INT_BUT, ISR_pin11, LOW, ISR_Type::IMMEDIATE); delay(500); // Starting measurement of AS5311 serial_init_measure(); // Save 2 most significant bits of start prevTwoSig = start & 0xC00; getNeopixel(Feather).set_color(2, 0, 0, 0, 0); // Turns off Neopixel LPrintln("\n ** Setup Complete ** "); } void loop() { // Initialize Hypnos digitalWrite(HYPNOS3, LOW); // Enable 3.3V rail //digitalWrite(HYPNOS5, HIGH); // Enable 5V rail digitalWrite(13, HIGH); delay(100); // Protocol to turn on AS5311 pinMode(CS, OUTPUT); pinMode(CLK, OUTPUT); pinMode(DO, INPUT_PULLUP); digitalWrite(CS, HIGH); digitalWrite(CLK, LOW); // Protocol to turn on Neopixel pinMode(LED, OUTPUT); // Initialize magnet sensor init_AS(); delay(2000); // Warmup AS5311 chip if (flag) { pinMode(23, OUTPUT); pinMode(24, OUTPUT); pinMode(10, OUTPUT); Feather.power_up(); } // Check to see if button was pressed for LED indicator verify_LED_button(); //-------------------------------- DATA MANAGEMENT ---------------------------------------------- int average = measure_average(); uint32_t errorBits = getErrorBits(CLK, CS, DO); // Also updates prevTwoSig to two most significant bits of first param, is being passed by ref elapsed = computeElapsed(average, prevTwoSig, elapsed); // Computes total distance in mm and um float distance = (elapsed + ((2.0 * ((int)average - (int)start)) / 4095.0)); float distanceMicro = (elapsed * 1000) + ((2000 * ((int)average - (int)start)) / 4095.0); float difference = 0; float differenceMicro = 0; // Reads the movement if any, else it sets the changed distance to 0 if (distance != prev) difference = distance - prev; if (distanceMicro != prevMicro) differenceMicro = distanceMicro - prevMicro; Feather.measure(); Feather.package(); /* Feather.add_data("AS5311", "Serial_Value", average); Feather.add_data("Displacement_mm", "mm", distance); Feather.add_data("Displacement_um", "um", distanceMicro); Feather.add_data("Difference_mm", "mm", difference); Feather.add_data("Difference_um", "um", differenceMicro); // Logs the status of the magnet position (whether the data is good or not) {Green = Good readings, Red = Bad readings} // Ignores the parity bit (last bit) if (errorBits >= 16 && errorBits <= 18) // Error bits: 10000, 10001, 10010 Feather.add_data("Status", "Color", "Green"); else if (errorBits == 19) // Error bits: 10011 Feather.add_data("Status", "Color", "Yellow"); else if (errorBits == 23) // Error bits: 10111 Feather.add_data("Status", "Color", "Red"); else if (errorBits < 16) // If OCF Bit is 0 Feather.add_data("Status", "Color", "OCF_Error"); else if (errorBits > 24) // If COF Bit is 1 Feather.add_data("Status", "Color", "COF_Error"); else Feather.add_data("Status", "Color", "Other_Error"); */ float temp, humid, SVP, VPD; float e = 2.71828; temp = Feather.get<Loom::SHT31D>()->get_temperature(); humid = Feather.get<Loom::SHT31D>()->get_humid(); SVP = (0.61078 * pow(e, (17.2694 * temp) / (temp + 237.3))); VPD = SVP * (1 - (humid / 100)); //Feather.add_data("VPD", "VPD", VPD); float rssi = Feather.get<Loom::LoRa>()->get_signal_strength(); //Feather.add_data("RSSI", "RSSI", rssi); prev = distance; prevMicro = distanceMicro; //----------------------------------------------------------------------------------- Feather.display_data(); // Log SD in case it doesn't send Feather.log_all(); counter++; // Send to address 0 after 10 data packets if (counter % max_packets == 0) { getLoRa(Feather).send_batch(0,4000); counter = 0; } getInterruptManager(Feather).RTC_alarm_duration(TimeSpan(0,0,DELAY_IN_MINUTES,DELAY_IN_SECONDS)); getInterruptManager(Feather).reconnect_interrupt(RTC_INT_PIN); getInterruptManager(Feather).reconnect_interrupt(INT_BUT); Feather.power_down(); // Protocol to shut down AS5311 pinMode(CLK, INPUT); pinMode(DO, INPUT); pinMode(CS, INPUT); // Protocol to shut off Neopixel pinMode(LED, INPUT); // Protocol to turn off Hypnos digitalWrite(13, LOW); digitalWrite(HYPNOS3, HIGH); //digitalWrite(HYPNOS5, LOW); // Protocol to shut down SD pinMode(23, INPUT); pinMode(24, INPUT); pinMode(10, INPUT); getSleepManager(Feather).sleep(); while (!flag); } //AS5311 functions void init_AS(){ // Protocol to turn on AS5311 pinMode(CS, OUTPUT); pinMode(CLK, OUTPUT); pinMode(DO, INPUT_PULLUP); digitalWrite(CS, HIGH); digitalWrite(CLK, LOW); delay(2000); } int measure_average(){ int average = 0; for (int j = 0; j < 16; j++) { average += getSerialPosition(CLK, CS, DO); } average /= 16; return average; } // Takes 16 measurements and averages them for the starting Serial value (0-4095 value) void serial_init_measure(){ for (int j = 0; j < 16; j++) { start += getSerialPosition(CLK, CS, DO); } start /= 16; } // Lights up LED is interrupt button is pressed void verify_LED_button(){ if (button) { uint32_t ledCheck = getErrorBits(CLK, CS, DO); if (ledCheck >= 16 && ledCheck <= 18) getNeopixel(Feather).set_color(2, 0, 200, 0, 0); // Green else if (ledCheck == 19) getNeopixel(Feather).set_color(2, 0, 200, 200, 0); // Yellow else getNeopixel(Feather).set_color(2, 0, 0, 200, 0); // Red delay(3000); getNeopixel(Feather).set_color(2, 0, 0, 0, 0); } flag = false; button = false; } // Ensures that magnet starts in good position before continuing program void verify_position(){ uint32_t ledCheck = getErrorBits(CLK, CS, DO); // Tracking magnet position for indicator while (ledCheck < 16 || ledCheck > 18) { if (ledCheck == 19) getNeopixel(Feather).set_color(2, 0, 200, 200, 0); // Changes Neopixel to yellow else getNeopixel(Feather).set_color(2, 0, 0, 200, 0); // Changes Neopixel to red delay(3000); // Gives user 3 seconds to adjust magnet before next reading ledCheck = getErrorBits(CLK, CS, DO); } } // Flashes green on Neopixel 3 times void green_flash(){ for (int i = 0; i < 3; i++) { getNeopixel(Feather).set_color(2, 0, 200, 0, 0); // Changes Neopixel to green delay(500); getNeopixel(Feather).set_color(2, 0, 0, 0, 0); // Turns off Neopixel delay(500); } } // Interrupt Functions void ISR_pin12() { detachInterrupt(RTC_INT_PIN); flag = true; } void ISR_pin11() { detachInterrupt(INT_BUT); flag = true; button = true; }Node (AS5311.h)
// Returns the serial output from AS533 uint32_t bitbang(int CLK, int CS, int DO) { // write clock high to select the angular position data digitalWrite(CLK, HIGH); delay(1); // select the chip digitalWrite(CS, LOW); delay(1); digitalWrite(CLK, LOW); // read the value in it's entirety uint32_t value = 0; for (uint8_t i = 0; i < 18; i++) { delay(1); digitalWrite(CLK, HIGH); if (i < 17) { delay(1); digitalWrite(CLK, LOW); } delay(1); auto readval = digitalRead(DO); if (readval == HIGH) value |= (1U << i); } digitalWrite(CS, HIGH); digitalWrite(CLK, HIGH); return value; } // Isolates the bottom 12 bits position value to decimal uint32_t convertBits(uint32_t num) { uint32_t readval = num & 0xFFF; uint32_t newval = 0; // Flips bits order for (int i = 11; i >= 0; i--) { uint32_t exists = (readval & (1 << i)) ? 1 : 0; newval |= (exists << (11 - i)); } return newval; } uint32_t getSerialPosition(int CLK, int CS, int DO){ return convertBits(bitbang(CLK, CS, DO)); } // Checks error bits uint32_t bitCheck(uint32_t num) { uint32_t readval = num & 0x3FFFF; // Saves entire value; not sure if there's a better way to do this uint32_t newval = 0; // Flips bits order for (int i = 16; i >= 12; i--) { uint32_t exists = (readval & (1 << i)) ? 1 : 0; newval |= (exists << (16 - i)); } return newval; } uint32_t getErrorBits(int CLK, int CS, int DO){ return bitCheck(bitbang(CLK, CS, DO)); } // Todo: Make more robust than just checking first two bits float computeElapsed(uint32_t curr, uint32_t &prevTwoSig, float elapsed) { uint32_t currTwoSig = curr & 0xC00; if((currTwoSig == 0xC00 && prevTwoSig == 0x0)) { Serial.println("ROLLOVER UNDERFLOW"); elapsed -= 2.0; } else if (prevTwoSig == 0xC00 && currTwoSig == 0x0) { Serial.println("ROLLOVER OVERFLOW"); elapsed += 2.0; } prevTwoSig = currTwoSig; return elapsed; }Hub (LTE)
#include <Loom.h> // Include configuration const char* json_config = #include "config.h" ; // In Tools menu, set: // Internet > LTE // Sensors > Enabled // Radios > Enabled // Actuators > Disabled // Max > Disabled using namespace Loom; Loom::Manager Feather{}; void setup() { pinMode(5, OUTPUT); digitalWrite(5, LOW); // Sets pin 5, the pin with the 3.3V rail, to output and enables the rail pinMode(6, OUTPUT); digitalWrite(6, HIGH); // Sets pin 6, the pin with the 5V rail, to output and enables the rail Feather.begin_serial(true); Feather.parse_config(json_config); Feather.print_config(); LPrintln("\n ** Setup Complete ** "); } void loop() { //if (getLoRa(Feather).receive_blocking(5000)) { if (getLoRa(Feather).receive_batch_blocking(5000)) { Feather.display_data(); getGoogleSheets(Feather).print_config(); getGoogleSheets(Feather).publish_batch(); getGoogleSheets(Feather).print_config(); } }Hub (Ethernet)
/////////////////////////////////////////////////////////////////////////////// // This is the simplest example of logging data to Google Sheets // The only difference between this example an 'Basic' is the LoomFactory // settings, the line: // Feather.GoogleSheets().publish(); // and the configuration, enabling logging to Google Sheets. // In the config, you need: // - MAC address for the Ethernet module (you could also replace Ethenet with WiFi) // You can use 'default' instead of a parameter list for Ethernet if you // are not on a network that restricts to only registered MAC addresses // - For Google sheets parameters, see: // https://github.com/OPEnSLab-OSU/Loom/wiki/Using-Loom-with-Google-Sheets /////////////////////////////////////////////////////////////////////////////// #include <Loom.h> // Include configuration const char* json_config = #include "config.h" ; // In Tools menu, set: // Internet > Ethernet // Sensors > Enabled // Radios > Disabled // Actuators > Disabled // Max > Disabled using namespace Loom; Loom::Manager Feather{}; void setup() { pinMode(5, OUTPUT); digitalWrite(5, LOW); // Sets pin 5, the pin with the 3.3V rail, to output and enables the rail pinMode(6, OUTPUT); digitalWrite(6, HIGH); // Sets pin 6, the pin with the 5V rail, to output and enables the rail Feather.begin_serial(true); Feather.parse_config(json_config); Feather.print_config(); LPrintln("\n ** Setup Complete ** "); } void loop() { if (getLoRa(Feather).receive_batch_blocking(5000)) { //if (getLoRa(Feather).receive_blocking(5000)) { Feather.display_data(); getGoogleSheets(Feather).print_config(); getGoogleSheets(Feather).publish_batch(); getGoogleSheets(Feather).print_config(); } }Config
Node
"{\ 'general':\ {\ 'name':'Dendro',\ 'instance':1,\ 'interval':2000\ },\ 'components':[\ {\ 'name':'Analog',\ 'params':[8,12,false,false,false,false,false,false,0,0,0,0,0,0,25]\ },\ {\ 'name':'SHT31D',\ 'params':'default'\ },\ {\ 'name':'DS3231',\ 'params':[10, false, true]\ },\ {\ 'name':'InterruptManager',\ 'params':[0]\ },\ {\ 'name':'SleepManager',\ 'params':[true,false,1]\ },\ {\ 'name':'SD',\ 'params':[true,1000,10,'dend',true]\ },\ {\ 'name':'BatchSD',\ 'params':[true,1000,10]\ },\ {\ 'name':'Neopixel',\ 'params':'default'\ },\ {\ 'name':'LoRa',\ 'params':[255,1,23,7,500]\ }\ ]\ }"Hub (LTE)
"{\ 'general':\ {\ 'device_name':'Device',\ 'instance_num':1,\ 'interval':3000\ },\ 'components':[\ {\ 'name':'LTE',\ 'params':['hologram','','','A5']\ },\ {\ 'name':'SD',\ 'params':[true,1000,10,'hub',true]\ },\ {\ 'name':'BatchSD',\ 'params':[true,1000,10]\ },\ {\ 'name':'DS3231',\ 'params':'default'\ },\ {\ 'name':'LoRa',\ 'params':[255,0,23,7,500]\ },\ {\ 'name':'GoogleSheets',\ 'params':[\ 'Goog',\ '/macros/s/AKfycbzySpouxdaHYh6f1e7DI24i4s8XTGDe-X6d-9uaR7HVrpFNWUt7/exec',\ '11bmZETLyFutZHwZRrpmsNFy0VrWmJ-myskjLZ6cZS-w',\ /*true to autoname tab*/ true,\ /*not used if previous param is true*/ 'testTab'\ ]\ }\ ]\ }"Hub (Ethernet)
"{\ 'general':\ {\ 'name':'Device',\ 'instance':1,\ 'interval':10000\ },\ 'components':[\ {\ 'name':'LoRa',\ 'params':[255,0,23,3,200]\ },\ {\ 'name':'SD',\ 'params':[true,1000,11,'hub',true]\ },\ {\ 'name':'BatchSD',\ 'params':[true,1000,11]\ },\ {\ 'name':'GoogleSheets',\ 'params':[\ 'Goog',\ '/macros/s/AKfycbzySpouxdaHYh6f1e7DI24i4s8XTGDe-X6d-9uaR7HVrpFNWUt7/exec',\ '11bmZETLyFutZHwZRrpmsNFy0VrWmJ-myskjLZ6cZS-w',\ /*true to autoname tab*/ true,\ /*not used if previous param is true*/ 'testTab'\ ]\ },\ {\ 'name':'Ethernet',\ 'params':[\ 'Ether1',\ [134,171,186,10,33,221],\ [192,168,0,1]\ ]\ }\ ]\ }"Additional context
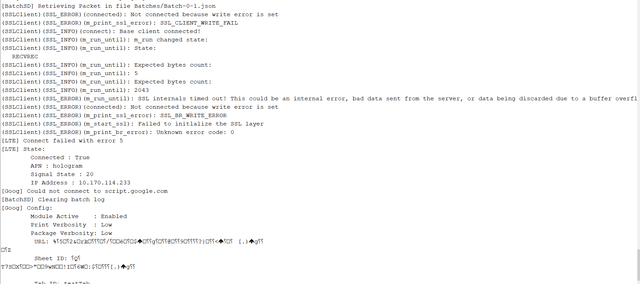
LTE Error Message:
Note: Whenever I get this LTE issue, I need to reupload the code back to the hub. FeatherFault will prevent it from booting up normally after getting this message.
Ethernet Error Messages:
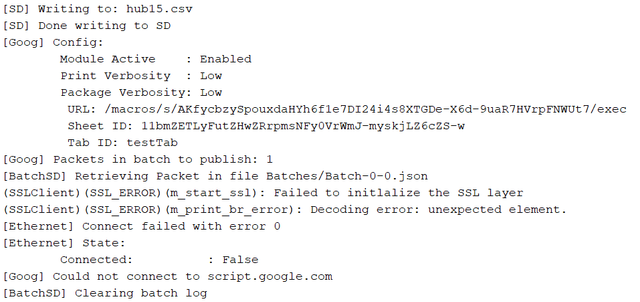
The text was updated successfully, but these errors were encountered: