
High-level view of the data collection system.
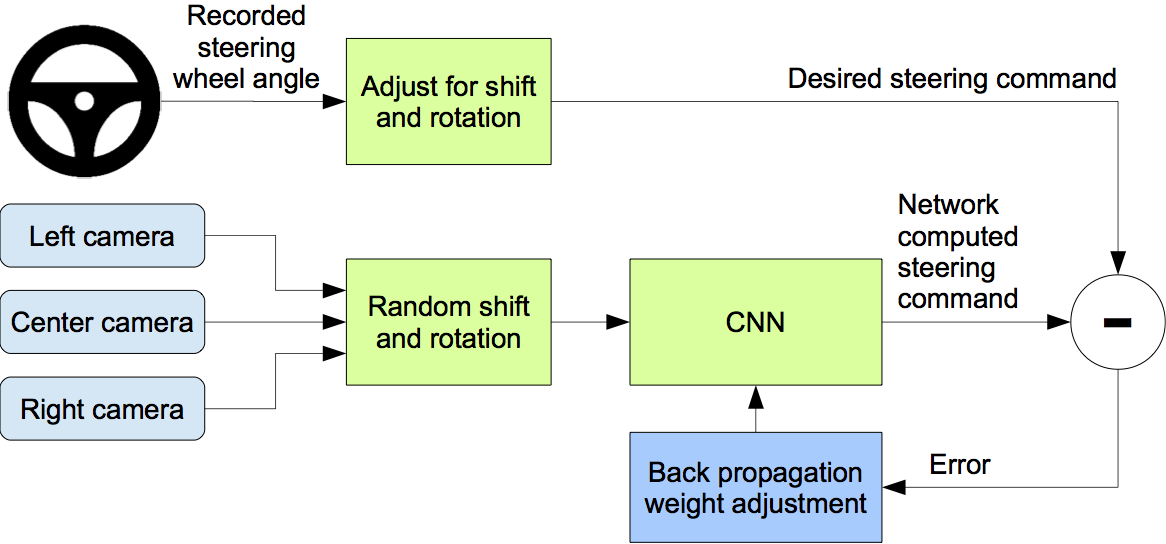
Training the neural network.

The trained network is used to generate steering commands from a single front-facing center camera.

CNN architecture. The network has about 27 million connections and 250 thousand parameters.